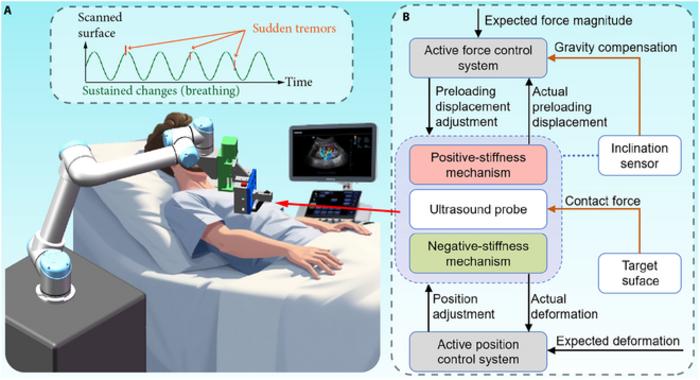
Recent advancements in robotic ultrasound technology are poised to revolutionize the field of diagnostic imaging, focusing on the significant enhancement of imaging consistency. One of the primary challenges in this sector is the ability to maintain stable contact force amid dynamic physiological changes such as breathing and involuntary movements, commonly referred to as tremors. Traditionally, continuous sensor recalibration has been required to address these fluctuations, a requirement that can complicate the operation of ultrasound machines significantly. However, a team led by Qingsong Xu, an esteemed professor at the University of Macau, has developed a groundbreaking solution that integrates a hybrid active-passive force control mechanism. This innovative approach promises to decouple the force regulation process from the dependency on real-time feedback while ensuring adaptability to a wide range of patients.
The core of this new system lies in its tripartite composition, which includes three key components designed to work in synergy. The first element is a passive constant-force mechanism, employing precisely crafted positive and negative stiffness beams that contribute to vibration buffering during scans. This design choice effectively addresses one of the critical limitations of traditional ultrasound systems by isolating harmful vibrations which can distort imaging quality. The second component involves the integration of strain gauges that facilitate real-time monitoring of deformation during the scanning process. This feedback loop enables the system to adjust dynamically as conditions change, significantly enhancing the robustness of the imaging procedure.
The final aspect of this sophisticated system incorporates active positioning stages that are crucial for gravitational compensation and fine-tuning of force adjustments. This multi-dimensional approach not only ensures consistent contact force but also significantly minimizes errors attributable to operator variability. The dual-functionality inherent in this hybrid mechanism guarantees that high-frequency disturbances are passively absorbed, concurrently allowing for active compensation of sustained displacements. The results of this research have been compelling, as stated by Zehao Wu, the study’s lead author, who noted the striking effectiveness of their design in maintaining force stability.
.adsslot_HxrJFgCdQc{ width:728px !important; height:90px !important; }
@media (max-width:1199px) { .adsslot_HxrJFgCdQc{ width:468px !important; height:60px !important; } }
@media (max-width:767px) { .adsslot_HxrJFgCdQc{ width:320px !important; height:50px !important; } }
ADVERTISEMENT
To validate their framework, the researchers conducted rigorous experiments using silicone models alongside human subjects subjected to simulated physiological vibrations. The outcomes were promising: the passive mechanism managed to achieve an impressive ≤7.20% force variation within its designated constant-force region, which allowed for an adjustable force range between 12.33 to 21.29 Newtons. More notably, the system effectively isolated tremors present at frequencies of up to 15 Hz, while also accommodating displacements induced by natural breathing movements, which were recorded at a frequency of 0.3 Hz with a 6 mm amplitude. During testing, the active control component successfully maintained force consistency even when the apparatus was tilted at inclinations of up to 25 degrees, which involved a gravity compensation of 1.11 Newtons.
As a result of these innovations, robotic operations yielded a remarkable reduction in image oscillation velocities. When compared to conventional manual scanning methods, their robotic system achieved imaging velocities of just 0.55 mm/s, vastly outperforming the greater than 1.0 mm/s typically produced by human-operated scans. This substantial improvement underscores the potential for robotics to enhance the accuracy and reliability of ultrasound imaging. By utilizing a hybrid approach to force control, the researchers significantly reduced the risks associated with overshoot, which is a common concern when relying exclusively on active control systems.
Another critical element highlighted by Wu is the application of strain-based feedback mechanisms, which enabled precise tuning of the constant-force zone. This advancement ensures that probe contact is synchronized with the varying compliance of tissues, thus providing a more personalized and effective scanning experience for different patients. Despite these advancements, the researchers do acknowledge certain limitations that still need addressing. For instance, the operational range of the force system remains somewhat restricted, confined between 12 and 21 Newtons, potentially limiting its applicability across more diverse patient profiles.
The size constraints of the mechanism also pose challenges in terms of clinical integration. Future iterations of this technology will focus on developing multi-range mechanisms that expand the system’s force capabilities while also incorporating semi-autonomous path planning to further enhance operational efficiency. This cutting-edge study represents a significant leap forward in medical robotics, merging mechanical intelligence with adaptive control to create a more robust and operator-agnostic ultrasound imaging method.
The research paper titled “Robotic Ultrasound Scanning End-Effector with Adjustable Constant Contact Force” has been published in the journal Cyborg and Bionic Systems. This work received support from various significant funding bodies, including the National Natural Science Foundation of China and the Macao Science and Technology Development Fund, highlighting the broad interest and investment in advancing medical technology. The implications of these advancements are profound; they present an opportunity not only for improved diagnostic capabilities but also for future innovations that can further enhance patient care and operational efficiencies in medical imaging.
This study, building on the pioneering efforts in robotic assistance in healthcare, underscores the significant strides that are being made toward integrating advanced robotic systems into daily medical practice. As research continues to evolve, the merger of robotics and medical technology promises to improve patient outcomes and refine diagnostic processes, ensuring clinicians have the tools they need to deliver the highest standard of care.
As robotic automation takes strides into sensitive fields such as ultrasound imaging, the future of healthcare looks increasingly intelligent and adaptable. With technologies like the hybrid active-passive force control mechanism, practitioners can expect not only to revolutionize how diagnoses are conducted but also contribute to enhanced patient experiences, pushing the boundaries of what is feasible in medical science today.
Subject of Research: Hybrid Active-Passive Force Control in Robotic Ultrasound Systems
Article Title: Robotic Ultrasound Scanning End-Effector with Adjustable Constant Contact Force
News Publication Date: May 2, 2025
Web References: [No specific web references provided]
References: [No specific references provided]
Image Credits: Credit: Qingsong Xu, Department of Electromechanical Engineering, Faculty of Science and Technology, University of Macau
Keywords
Health and medicine, Applied sciences and engineering, Scientific community
Tags: adjustable constant contact forcediagnostic imaging advancementshybrid active-passive force controlimaging consistency improvementsinnovative ultrasound scanning solutionsphysiological changes in ultrasoundQingsong Xu University of Macaureal-time feedback decouplingrobotic ultrasound technologytremor management in imagingultrasound machine operation challengesvibration buffering mechanisms


{kind=link}