Kirigami balloons could be used in medical devices, soft robotics
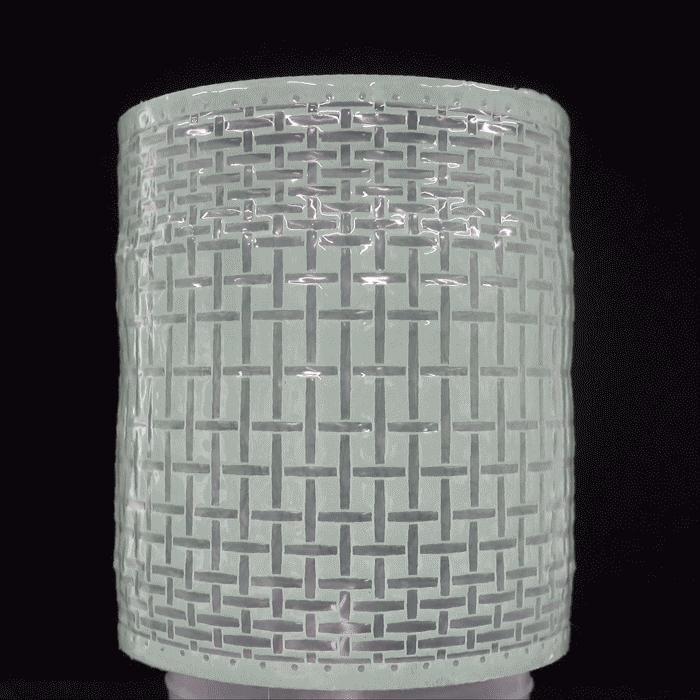
Credit: (Image courtesy of the Bertoldi Lab/Harvard SEAS)
Balloon shaping isn’t just for kids anymore. A team of researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) has designed materials that can control and mold a balloon into pre-programmed shapes. The system uses kirigami sheets — thin sheets of material with periodic cuts — embedded into an inflatable device. As the balloon expands, the cuts in the kirigami sheet guide the growth, permitting expansion in some places and constricting it in others. The researchers were able to control the expansion not only globally to make large-scale shapes, but locally to generate small features.
The team also developed an inverse design strategy, an algorithm that finds the optimum design for the kirigami inflatable device that will mimic a target shape upon inflation.
“This work provides a new platform for shape-morphing devices that could support the design of innovative medical tools, actuators and reconfigurable structures,” said Katia Bertoldi, the William and Ami Kuan Danoff Professor of Applied Mechanics at SEAS and senior author of the study.
The research is published in Advanced Materials.
An individual cut on a kirigami sheet contributes to the larger shape of the balloon like a pixel helps form an image on a 2D surface. The researchers found that by tuning the geometric parameters of these cuts, they could control and embed complex shapes.
“By only varying two parameters of the pixels, we can program all different kinds of crazy shapes into the kirigami balloons, including bends, twists and expansions,” said Antonio Elia Forte, a postdoctoral fellow at SEAS and co-first author of the study. “Our strategy allows us to automatically design a morphable balloon starting from the shape that you need. It’s a bottom-up approach that for the first time harnesses the elasticity of the material, not only kinematic.”
Using these parameters, the researchers developed an inverse algorithm that could mix and match pixels of different width and height, or delete certain pixels altogether, to achieve the desired shape. By manipulating the parameters of individual pixels, the researchers were able to tune shapes at a significantly smaller scale. To demonstrate this, they programmed a balloon to mimic the shape of a squash (the experiments took place around Halloween) complete with the characteristic bumps and ridges along the side.
“By controlling the expansion at every level of the kirigami balloon, we can reproduce a variety of target shapes,” Lishuai Jin, a graduate student at SEAS and co-first author of the paper.
The researchers also made kirigami balloons in the shapes of calabash gourds, hooks and vases, demonstrating that the approach is general enough to mimic any given shape.
Next, the researches aim to use these kirigami balloons as shape-changing actuators for soft robots. The work lays a foundation for the design of structures at multiple scales: from micro minimally-invasive surgical devices to macro structures for space exploration.
###
This research was co-authored by Bolei Deng and Ahmad Rafsanjani. It was supported by the National Science Foundation under Grants No. DMR-1420570 and DMR-1922321.
Media Contact
Leah Burrows
[email protected]
Original Source
https:/
Related Journal Article
http://dx.


{kind=link}