
Revolutionizing Robotics Programming with SWORD: A Breakthrough in Automation Development
In an age where automation is transforming the landscape of industries worldwide, the Southwest Research Institute (SwRI) has unveiled a groundbreaking software tool aimed at revolutionizing robotics programming. Known as the SwRI Workbench for Offline Robotics Development, or SWORD™, this innovative platform is designed to streamline automation processes, providing an intuitive interface that significantly reduces the manual coding labor traditionally associated with complex robotics applications. By harnessing the power of 3D modeling and simulation, SWORD enables users to model, plan, and execute robotic movements with unprecedented ease and efficiency.
SWORD allows users to operate within a state-of-the-art computer-aided design (CAD) environment, where they can access advanced robotic modeling tools tailored for configuring systems and orchestrating motions of robotic arms, tools, and entire work cells. With its seamless integration of 3D visualizations and the Robot Operating System (ROS), SWORD effectively bridges the gap between digital simulations and real-world hardware execution. This capability holds immense potential for enhancing productivity and reducing the time required for the deployment of robotic solutions.
At the helm of the SWORD project is Michael Ripperger, who emphasizes the thoughtfulness invested in creating a simulation tool that translates robotic movements into actionable command sequences for hardware operation. This approach not only caters to seasoned robotics professionals but also accommodates manufacturing engineers who may lack extensive coding backgrounds. Ripperger’s vision for SWORD encapsulates the need for an accessible, user-friendly platform that fosters collaboration between various stakeholders in the technological sphere.
During the Automate show scheduled for May 12-15 in Detroit, SwRI will showcase SWORD in action. Attendees are invited to Booth No. 5607 to witness a live demonstration of SWORD in operation, as a robot arm adeptly navigates the intricate process of setting up pathways for a jigsaw puzzle-shaped part within the CAD interface. This demonstration is poised to illustrate the platform’s potential to unlock complex applications that could otherwise require extensive time and financial investments, making robotics programming accessible and feasible for a broader audience.
Traditionally, the ROS-Industrial workflow demands a deep understanding of programming languages and intricate software code libraries. Even experienced developers within the ROS-Industrial ecosystem may find themselves confronting the daunting challenge of spending weeks, if not months, on the initial setup phase of a robotics application. The advent of SWORD signifies a transformative shift towards democratizing robotics programming, where barriers are dismantled, allowing professionals from diverse backgrounds to engage with advanced technology.
As invested stewards of the ROS-Industrial Americas Consortium, SwRI plays a crucial role in supporting ROS-I software repositories while conducting training sessions and developer events. By developing SWORD, SwRI seeks to empower manufacturing engineers equipped with CAD knowledge, enabling them to leverage the sophisticated functionalities embedded within the ROS codebase, thus elevating their operational capabilities.
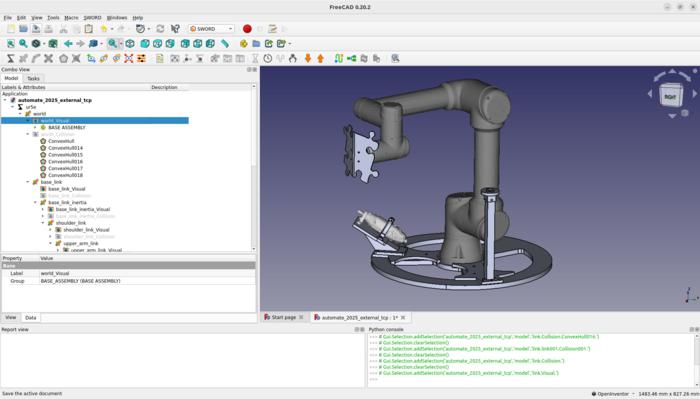
One of the primary components of SWORD is its functionality as a plugin to the FreeCAD application. This integration provides a graphical toolkit that enables users to construct motion planning contexts and collision geometries, facilitating the testing of advanced robotic motion-planning applications. With SWORD, engineers can construct detailed digital models of their robotic systems, including fixtures and end-of-arm tooling, enabling them to evaluate joint configurations dynamically.
Users can manipulate and control robot models utilizing intuitive joint sliders, simulating tool movement through drag-and-drop functionality that enhances the user experience. Furthermore, the platform’s ability to generate motion plans using commercial path planners empowers users to create bespoke pipelines tailored to specific operational needs while ensuring the ability to predict and circumvent potential collisions, a crucial aspect in robotics programming.
The SWORD platform also promotes the definition of robot motion via coordinate-based or joint waypoints. This flexibility allows users to specify various movement segment types and motion groups, creating a comprehensive and customizable experience that aligns with industry-specific requirements. Supplementary commands can also be integrated into the motion planning pipeline, making SWORD one of the most versatile tools available for robotic automation development.
Ultimately, the primary objective behind developing SWORD is to adapt ROS for the manufacturing and industrial sectors in a manner that resonates with their unique needs. The emphasis on an approachable interface that ricochets off familiar environments culminates in a robust and powerful methodology. Through SWORD, SwRI is paving the way for greater adaptability in automation practices, which is increasingly crucial in today’s rapidly evolving industrial landscape.
With its amalgamation of advanced technological capabilities and user-centric design, SWORD stands poised to redefine the practices governing robotics programming. As industry stakeholders engage with this novel software, the implications for productivity, efficiency, and innovation are profound. The future of robotics is not just about advanced machinery but also about empowering engineers across diverse fields to harness technology seamlessly and effectively.
As we continue to observe the evolution of automation in contemporary industries, SWORD emerges as a quintessential tool in the arsenal of robotics engineers, manufacturing professionals, and technologists alike. The journey toward democratizing robotics programming is well underway, facilitated by cutting-edge innovations like SWORD that drive progress and unlock new possibilities in the realm of automation.
Subject of Research: Robotics programming and automation development with the SWORD software.
Article Title: Revolutionizing Robotics Programming with SWORD: A Breakthrough in Automation Development.
News Publication Date: May 13, 2025.
Web References: Not provided.
References: Not provided.
Image Credits: Southwest Research Institute.
Keywords
Robotics, Robotic designs, Robot control, Robot kinematics, Manufacturing.
Tags: 3D modeling and simulation in roboticsadvanced robotic modeling techniquesautomation programming solutionsCAD environment for roboticsintuitive robotics interfaceoffline robotics development toolsproductivity in robotic solutionsreal-world hardware execution in roboticsrevolutionizing automation processesRobot Operating System integrationSWORD robotics softwareSwRI robotics innovations


{kind=link}