Credit: @Science China Press
A recent study proposed a three-dimensional LotusMenu that can “bloom in the palm”. With this menu, even if you are not Nezha, you can also control your own lotus.
The research paper is titled: “LotusMenu: A 3D Menu using Wrist and Elbow Rotation Inspired by Chinese Traditional Symbol”. It’s published in SCIENCE CHINA Information Sciences recently, written by Associate Professor Lu Fei’s human-computer interaction research team from Beijing University of Posts and Telecommunications. Based on the metaphor of the traditional lotus pattern, the researchers proposed a 3D LotusMenu, which uses the rotational motion of wrist and elbow to control the menu selection.
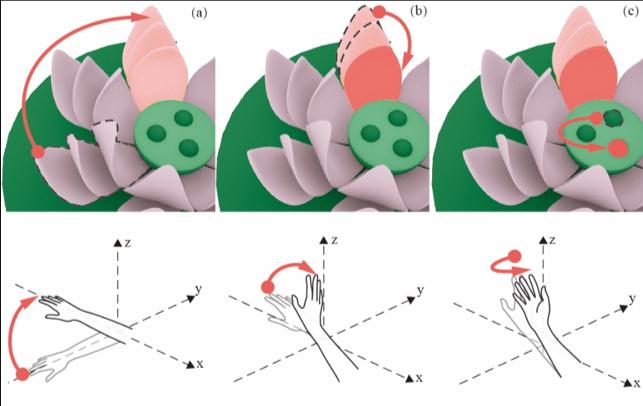
In the design of this interactive technology, the researchers corresponded the shape of the lotus to the 3D rotation gesture: mapping the selection of circular petal groups to the rolling gesture of elbow (Figure 1(a)), the selection of layered petals to the pitching gesture of wrist (Figure 1(b)), and the selection of circular lotus seeds to the yawing gesture of wrist (Figure 1(c)). During the interaction, there is almost no shoulder movement, so that the gesture can be easily performed within a small range of motion. In addition, on this basis, the rotation of the wrist and arm is merged as much as possible, so the fatigue caused by gestures is further reduced.
In the experiment, the researchers compared the user performance of LotusMenu and traditional linear menus. The results show that LotusMenu can significantly reduce the completion time of the selection task, while it perceived less fatigue as well. This result can expand the application of 3D rotating gestures in human-computer interaction, and has significant reference value for the future application of 3D rotating interactive components in large-screen interactive systems and virtual reality systems.
###
See the article:
Lyu F, Liu Y J, Huang J, et al. LotusMenu: a 3D menu using wrist and elbow rotation inspired by Chinese traditional symbol. Sci China Inf Sci, 2021, 64(10): 204101,
https:/
Media Contact
LYU Fei
[email protected]
Original Source
http://doi.
Related Journal Article
http://dx.



{kind=link}