Scientists develop improved image processing algorithm that can more accurately detect tactile paving in various lighting conditions and environments
Credit: Shibaura Institute of Technology (SIT)
Sight is by far the sense that we humans use the most when navigating an environment. When those who are blind or visually impaired walk alone, they put themselves at great risk of falling or colliding with obstacles, especially when traversing new places. Unfortunately, the number of visually impaired people throughout the world is likely to increase in the near future because of the rapidly aging population. Thus, there is an urgent need for innovative and cost-effective solutions to help visually impaired people navigate safely.
A promising strategy that was first implemented in Japan and then replicated throughout the world is called tactile paving. Inspired by Braille, the reading system of the blind, tactile paving essentially consists of placing textured tiles to form a guiding path that can be felt through the sole or with a cane. With the advent of modern digital technology, researchers worldwide are trying to implement camera-based support systems to help visually impaired or blind people find and stay on tactile paving paths, as well as warn the user of impending obstacles.
However, many challenges remain unsolved in currently available options, which results in limited applicability. “Many existing camera-based approaches for detecting tactile paving depend on filtering color information with fixed thresholds, though this strategy is not reliable in contexts with variable lighting conditions that can cause large changes in color,” explains Associate Professor Chinthaka Premachandra from Shibaura Institute of Technology (SIT), Japan. “This problem is made worse by the fact that different places use different color schemes for their tactile paving,” he adds.
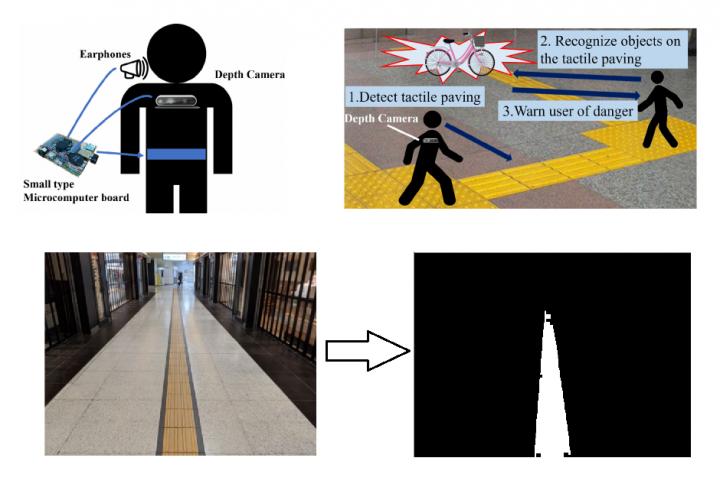
In an effort to tackle these problems efficiently, Dr. Premachandra and his team have developed a new image processing algorithm that can more accurately detect tactile paving. As described in their latest study published in IEEE Access, their proposed support system consists of a forward-facing depth camera worn around the chest that is connected to a small microcomputer board roughly the size of a credit card. The board continuously executes the image processing algorithm on the data captured by the camera and detects tactile paving. If an obstacle on the tactile paving is detected, the system warns the user through earphones.
The most important part of the system–the image processing algorithm–was the focus of the study. The team’s objective was to make the detection of tactile paving independent of pre-defined color thresholds. To this end, they first employed a widely studied technique called the Hough line transform. With it, straight lines in any image can be found, therefore making it relatively easy to find the borders of the tactile paving. Once the tentative borders of the tactile paving are found, the algorithm looks at the distribution of colors in a small area near the center of the path. Through statistical analyses, it determines an appropriate threshold for the current frame to generate an appropriate ‘image mask’ that marks the tactile paving. Finally, after a few final adjustments to reduce noise are made, the result is an image in which the tactile paving is clearly identified.
The scientists tested their system experimentally using nearly a thousand pictures of tactile paving from around the world. Excited about the promising results, Dr. Premachandra remarks: “The proposed system correctly detected tactile paving 91.65% of the time in both indoor and outdoor environments under varying lighting conditions, which is a markedly higher accuracy than previous camera-based methods with fixed thresholds.” Another notable advantage of the system is that it can be implemented in small microprocessor-based circuits, unlike other strategies that required the user to carry a laptop.
With eyes set on the future, Dr. Premachandra and his team are working on increasing the system’s processing speed and further improving its accuracy, especially under extreme lighting conditions such as those in the nighttime and when under very bright lights. Hopefully, future progress in cost-effective and practical support systems will make it safer for visually impaired people to walk alone, giving them more freedom and confidence to go to new places.
###
Reference
Title of original paper: Tactile Paving Detection by Dynamic Thresholding Based on HSV Space Analysis for Developing a Walking Support System
Journal IEEE Access
DOI: 10.1109/ACCESS.2021.3055342
About Shibaura Institute of Technology (SIT), Japan
Shibaura Institute of Technology (SIT) is a private university with campuses in Tokyo and Saitama. Since the establishment of its predecessor, Tokyo Higher School of Industry and Commerce, in 1927, it has maintained “learning through practice” as its philosophy in the education of engineers. SIT was the only private science and engineering university selected for the Top Global University Project sponsored by the Ministry of Education, Culture, Sports, Science and Technology and will receive support from the ministry for 10 years starting from the 2014 academic year. Its motto, “Nurturing engineers who learn from society and contribute to society,” reflects its mission of fostering scientists and engineers who can contribute to the sustainable growth of the world by exposing their over 8,000 students to culturally diverse environments, where they learn to cope, collaborate, and relate with fellow students from around the world.
Website: https:/
About Professor Chinthaka Premachandra from SIT, Japan
Chinthaka Premachandra is the manager of the Image Processing and Robotics Laboratory at SIT, where he became an Associate Professor at the Department of Electronic Engineering, Graduate School of Engineering and Science, in 2018. His laboratory conducts research in image processing and robotics. His research interests include AI, computer vision, pattern recognition, speed up image processing, camera-based intelligent transport systems, terrestrial robotic systems, flying robotic systems, and integration of terrestrial robot and flying robot. He received the FIT Best Paper Award from IEICE/IPSJ in 2009 and the FIT Young Researchers Award from IEICE/IPSJ in 2010.
Funding Information
This study was supported in part by the Branding Research Fund of Shibaura Institute of Technology.
Media Contact
Wang Yu
[email protected]
Original Source
https:/
Related Journal Article
http://dx.



{kind=link}