PITTSBURGH–Clutter is a special challenge for robots, but new Carnegie Mellon University software is helping robots cope, whether they’re beating a path across the Moon or grabbing a milk jug from the back of the refrigerator.
The software not only helped a robot deal efficiently with clutter, it surprisingly revealed the robot’s creativity in solving problems.
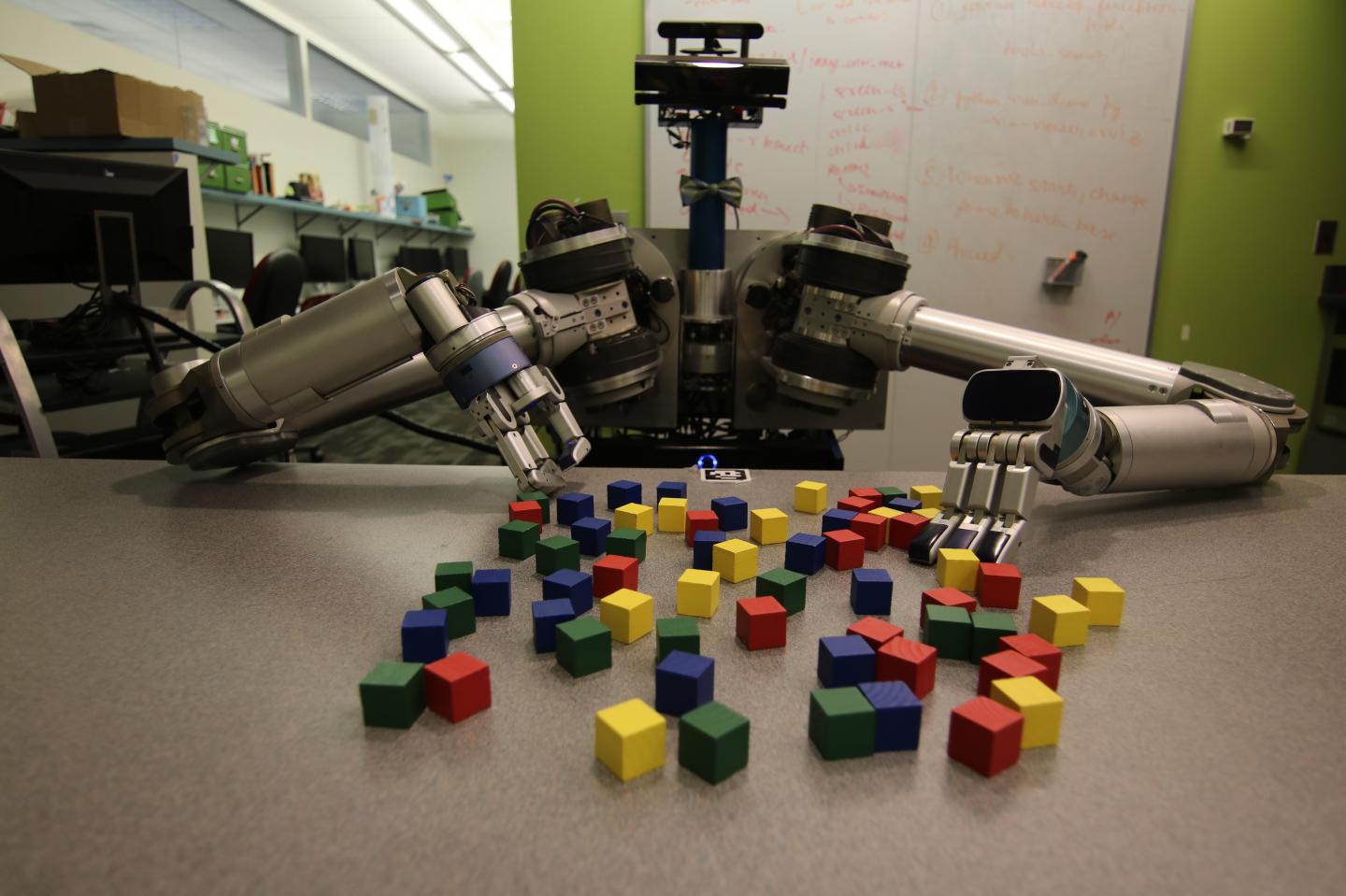
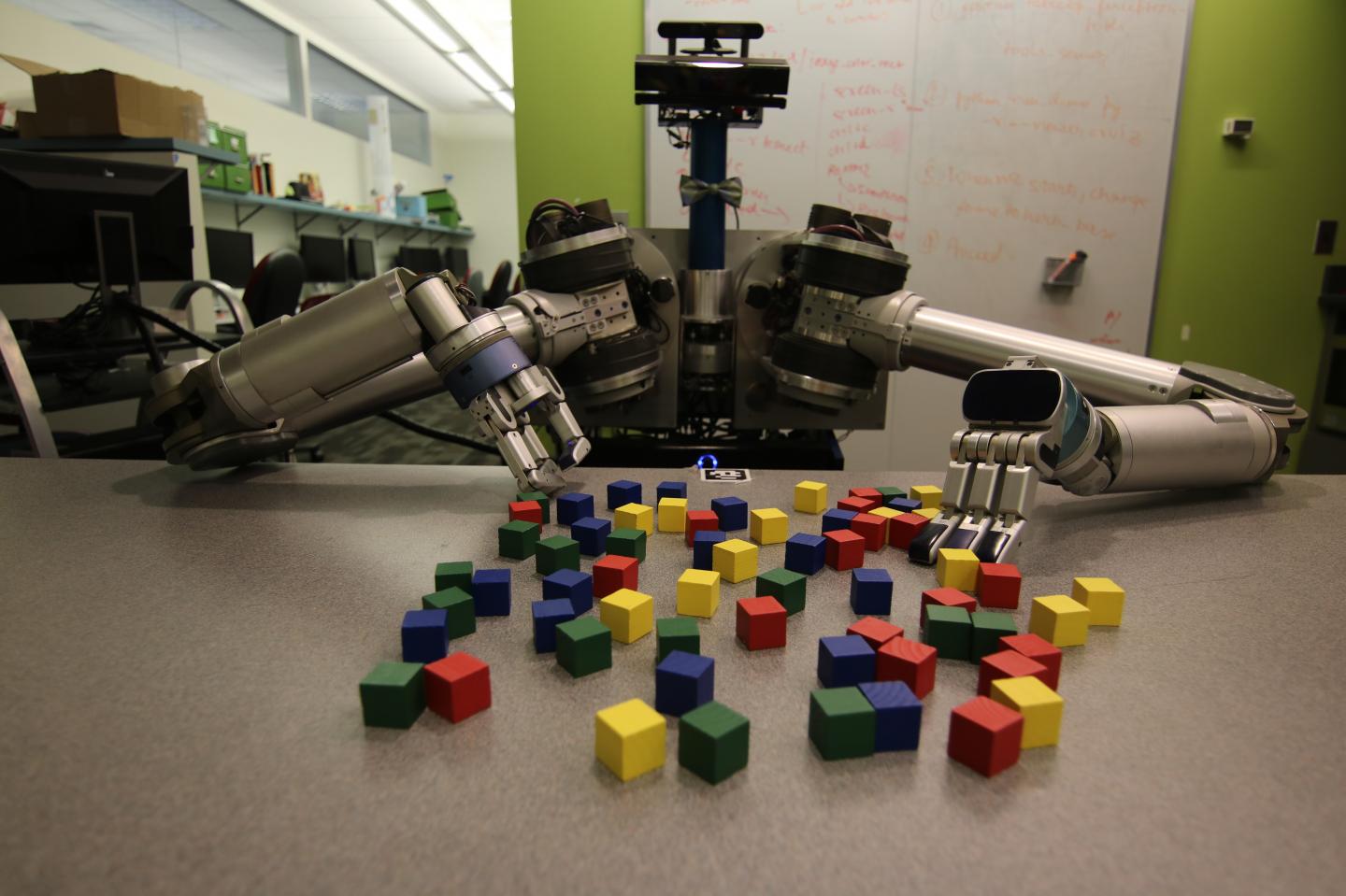
“It was exploiting sort of superhuman capabilities,” Siddhartha Srinivasa, associate professor of robotics, said of his lab’s two-armed mobile robot, the Home Exploring Robot Butler, or HERB. “The robot’s wrist has a 270-degree range, which led to behaviors we didn’t expect. Sometimes, we’re blinded by our own anthropomorphism.”
In one case, the robot used the crook of its arm to cradle an object to be moved.
“We never taught it that,” Srinivasa added.
The rearrangement planner software was developed in Srinivasa’s lab by Jennifer King, a Ph.D. student in robotics, and Marco Cognetti, a Ph.D. student at Sapienza University of Rome who spent six months in Srinivasa’s lab. They will present their findings May 19 at the IEEE International Conference on Robotics and Automation in Stockholm, Sweden.
In addition to HERB, the software was tested on NASA’s KRex robot, which is being designed to traverse the lunar surface. While HERB focused on clutter typical of a home, KRex used the software to find traversable paths across an obstacle-filled landscape while pushing an object.
Robots are adept at “pick-and-place” (P&P) processes, picking up an object in a specified place and putting it down at another specified place. Srinivasa said this has great applications in places where clutter isn’t a problem, such as factory production lines. But that’s not what robots encounter when they land on distant planets or, when “helpmate” robots eventually land in people’s homes.
P&P simply doesn’t scale up in a world full of clutter. When a person reaches for a milk carton in a refrigerator, he doesn’t necessarily move every other item out of the way. Rather, a person might move an item or two, while shoving others out of the way as the carton is pulled out.
The rearrangement planner automatically finds a balance between the two strategies, Srinivasa said, based on the robot’s progress on its task. The robot is programmed to understand the basic physics of its world, so it has some idea of what can be pushed, lifted or stepped on. And it can be taught to pay attention to items that might be valuable or delicate, in case it must extricate a bull from a china shop.
One limitation of this system is that once the robot has evaluated a situation and developed a plan to move an object, it effectively closes its eyes to execute the plan. Work is underway to provide tactile and other feedback that can alert the robot to changes and miscalculations and can help it make corrections when necessary. NASA, the National Science Foundation, Toyota Motor Engineering and Manufacturing and the Office of Naval Research supported this research.
###
About Carnegie Mellon University: Carnegie Mellon is a private, internationally ranked research university with programs in areas ranging from science, technology and business, to public policy, the humanities and the arts. More than 13,000 students in the university’s seven schools and colleges benefit from a small student-to-faculty ratio and an education characterized by its focus on creating and implementing solutions for real problems, interdisciplinary collaboration and innovation.
Media Contact
Byron Spice
[email protected]
412-268-9068
@CMUScience
http://www.cmu.edu
The post Robots get creative to cut through clutter appeared first on Scienmag.


{kind=link}