The doughnut-shaped, plastic rubber device crimps its skin to latch onto anything from cloth to beakers filled with liquid.
Credit: Weifeng Yuan
WASHINGTON, January 14, 2020 — Most robotic gripping mechanisms to date have relied on humanlike fingers or appendages, which sometimes struggle to provide the fine touch, flexibility or cost-effectiveness needed in some circumstances to hold onto objects. Recent work looks to provide a path forward for gripping robots from an unlikely source — the doughnut-shaped sea anemone.
Researchers at the Southwest University of Science and Technology and Tsinghua University in China demonstrated a robotic gripping mechanism that mimics how a sea anemone catches its prey. The bionic torus captures and releases objects by crimping its skin. The grasper not only is relatively cheap and easy to produce but also can grab a variety of objects of different sizes, shapes, weights and materials. They discuss their work in this week’s Applied Physics Letters, from AIP Publishing.
“In industries, multi-fingered dexterous hands are widely used to perform grabbing tasks. However, these end-effectors consist of a large number of components, like joints and sensors, which are difficult to control,” said author Weifeng Yuan.
The thermoplastic rubber skin that lines the exterior of the liquid-filled ring rolls inward when the inner skin of the gripper experiences a pulling force, sucking in whatever target being grabbed.
Researchers can adjust various features of the torus, such as the rolling direction and length of the skin, to control whether items are engulfed, swallowed or released.
“We found that sea anemones can capture sea creatures with different shapes and sizes, so we decided to investigate the mechanism of the predation strategy, and we believed that the study would be helpful to the design of adaptive soft graspers,” Yuan said.
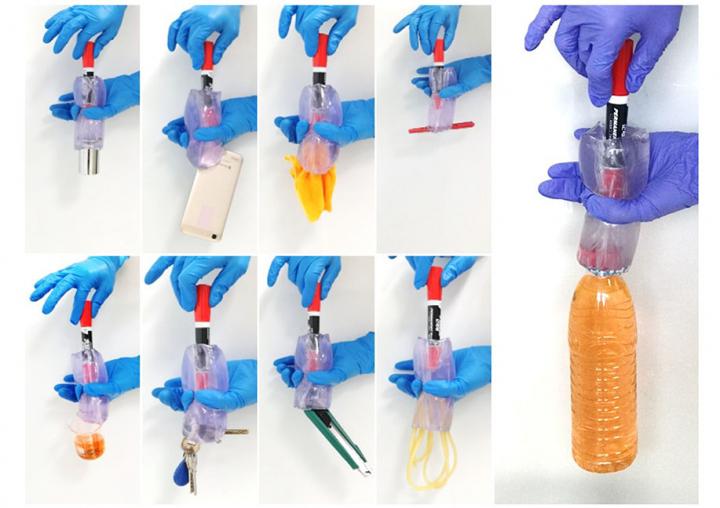
The group demonstrated the device by latching onto objects, ranging from a piece of cloth to a cellphone to a glass beaker filled with liquid.
Yuan said a flexible gripper has the potential to grasp fragile objects in narrow spaces or extreme, high-pressure environments, such as collecting samples of deep-sea organisms or conveying pipes. What’s more, the grasper can also be built on the nanoscale to manipulate individual cells. Yuan sees potential in developing surgical instruments.
“Our grasper can grasp a steel bar from a table one minute and an egg from a basket the next without resetting control parameters,” Yuan said.
The group hopes to continue fleshing out the potential for such a unique device, such as increasing the strength-to-weight ratio by using air instead of liquids.
###
The article, “Bionic torus as a self-adaptive soft grasper in robots,” is authored by Hongbin Zang, Bing Liao, Xin Lang, Zi-Long Zhao, Weifeng Yuan and Xi-Qiao Feng. The article appeared in Applied Physics Letters on Jan. 14, 2020 (DOI: 10.1063/1.5128474) and can be accessed at https:/
ABOUT THE JOURNAL
Applied Physics Letters features rapid reports on significant discoveries in applied physics. The journal covers new experimental and theoretical research on applications of physics phenomena related to all branches of science, engineering, and modern technology. See https:/
Media Contact
Larry Frum
[email protected]
301-209-3090
Related Journal Article
http://dx.



{kind=link}