A revolutionary approach to robotics in surgery has emerged from a compelling study conducted by researchers at Hefei University of Technology. The team unveils an innovative framework for soft tissue manipulation during autonomous robotic surgeries, aimed at addressing the complex challenges faced in intraoperative environments. The paper highlights a particularly groundbreaking intuition-guided deep reinforcement learning system that prepares robotic systems to adaptively respond to dynamic surgical conditions, especially when dealing with unknown constraints.
In the realm of medical robotics, soft tissue manipulation often proves to be an arduous task, compounded by unpredictable factors inherent to the human body during surgical procedures. Previous methodologies have relied on the assumption that grasping points for manipulation can be predetermined and remain stable. However, the reality is that tissues deform in unpredictable manners when subjected to external forces, and obstacles may complicate these tasks even further. This new research aggressively addresses the limitations of traditional robotic systems in surgical settings, enabling robots to operate more autonomously while making informed decisions in real-time.
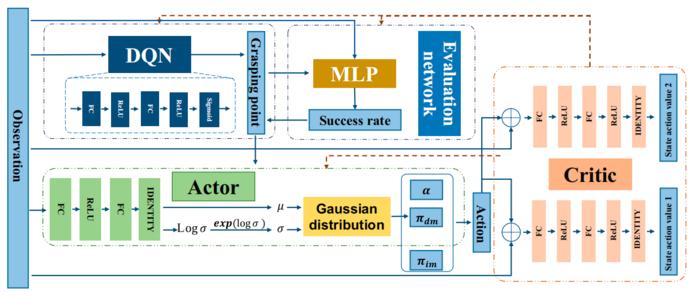
One of the critical components of the researchers’ framework is its segmented approach to the manipulation process. The first phase focuses on determining and evaluating optimal grasping points, which is essential for effective tissue manipulation. Using a deep Q-network-based algorithm, the researchers innovatively tackle the challenge of selecting the initial grasping point. The system processes high-dimensional state inputs and outputs corresponding action values for various grasping points, allowing for intelligent selection based on potential effectiveness.
As a notable advancement, the team has integrated a grasp point quality assessment network into their approach. This network serves to predict the likelihood of success for selected grasp points, enabling the autonomous robot to reassess its choices based on performance metrics during testing. If the predicted success falls below established thresholds, the system recalibrates, enhancing the probability of achieving desired outcomes during actual surgical operations. Such iterative feedback and refinement reflect the adaptability sought in modern robotic systems.
The second part of this pioneering work emphasizes the implementation of a deep reinforcement learning-based fusion strategy for executing soft tissue manipulation tasks. Central to this phase is the soft actor-critic (SAC) algorithm, which facilitates multi-modal integration of tissue manipulation techniques post initial grasping point selection. This enables the robot to navigate the intricate and often unpredictable internal environment of soft tissues, intelligently adjusting its actions to accommodate varying conditions.
Through simulated testing on a liver model, the efficacy of this method has been validated. Results have demonstrated that the proposed framework competently manages three essential deformation tasks: position-based, curve-based, and region-based manipulations. Crucially, the framework also exhibits resilience to obstacles and dynamic variations, showcasing its adaptability in a range of surgical scenarios.
Remarkably, the ID-SAC framework has shown superior performance compared to traditional SAC algorithms in terms of both task execution and exploratory capabilities. This advantage is especially pronounced in scenarios marked by unpredicted challenges, such as encountering obstacles or adapting to unforeseen tissue dynamics. In comparative analyses, the robotic system not only completed tasks more swiftly but also achieved smoother manipulation pathways—an indication of heightened precision—although human operators retained some advantages in control during complex situations.
This research not only opens up exciting possibilities for robotic surgical applications but also frames the conversation around the future of autonomous surgeries. The ID-SAC framework alludes to a future where complex surgical environments can be navigated with the same dexterity and fluidity as human operators, positioning robotics as a formidable ally within the operating room. With the potential for widespread clinical application, this research elevates the discourse surrounding robotics in medicine, highlighting the profound implications for patient outcomes and surgical efficiency.
The expansive nature of the study can be attributed to its multi-disciplinary framework, integrating principles from various domains including machine learning, robotics, and surgical practices. The collaborative efforts of the research team—which comprises talented individuals Xian He, Shuai Zhang, Jian Chu, Tongyu Jia, Lantao Yu, and Bo Ouyang—exemplify the potential of interdisciplinary innovation to tackle complex, real-world challenges.
Funding support for the study was generously provided through multiple grants, underscoring the significance of collaboration within the scientific community. Notable sources of funding include the Young Scientists Fund of the National Natural Science Foundation of China, the National Key Research and Development Program of China, among others. Such financial backing highlights both the value of the research theme and the strategic investments being made toward advancing surgical technologies.
The implications of this study extend beyond mere technical achievement; they also hold great promise for improving surgical procedures and patient care. By reducing the risks associated with soft tissue manipulation and enhancing the capabilities of robotic surgical systems, this framework could lead to more effective and safer surgical practices. As further developments unfold in this space, alone or in combination with new technologies, the entire landscape of surgery could witness unprecedented enhancements toward precision and autonomy.
The research paper, titled “Intuition-guided Reinforcement Learning for Soft Tissue Manipulation with Unknown Constraints,” was officially published in the journal Cyborg and Bionic Systems on April 14, 2025. As the methodology progresses through additional testing and refinement, there is significant anticipation regarding its application in clinical settings, representing a noteworthy advancement in medical technology.
Moving forward, the healthcare industry must remain vigilant and supportive of these advancements, as integrating innovative technologies like the ID-SAC framework into routine surgical procedures could transform the future of medicine. The onset of a new era for surgical robotics is just on the horizon, driven by research that empowers machines to learn, adapt, and perform with unparalleled precision.
Ultimately, the study serves as a beacon of potential in robotic surgery, drawing attention to the critical need for ongoing research and development. The commitment to advancing surgical technologies through innovative methodologies will yield long-term benefits, shaping how we understand and approach medical care in years to come.
Subject of Research: Intuition-guided Reinforcement Learning for Soft Tissue Manipulation with Unknown Constraints
Article Title: Intuition-guided Reinforcement Learning for Soft Tissue Manipulation with Unknown Constraints
News Publication Date: April 14, 2025
Web References: https://doi.org/10.34133/cbsystems.0114
References: Cyborg and Bionic Systems, DOI: 10.34133/cbsystems.0114
Image Credits: Credit: Xian He, Hefei University of Technology
Keywords
Applied sciences and engineering, Life sciences
Tags: adaptive response to surgical conditionsautonomous robotic surgerieschallenges in soft tissue handlingdeep reinforcement learning in roboticsdynamic manipulation strategiesHefei University of Technology researchintuition-driven roboticsreal-time decision making in roboticsrobotics in intraoperative environmentssoft tissue manipulationsurgical robotics innovationsunknown constraints in surgery


{kind=link}