
Innovations in robotics have long been at the forefront of technological advancement, with researchers tirelessly working to develop solutions that enhance the capabilities of robotic systems. A recent breakthrough led by Dr. Van-Truong Nguyen and his team at Hanoi University of Industry presents an exciting addition to the field of robotic mobility: the novel adaptive nonlinear proportional integral derivative radial basis function neural network (NPID-RBFNN) controller for ballbot devices. This pioneering technology offers a solution to the inherent challenges faced by such mobile robots in dynamic environments.
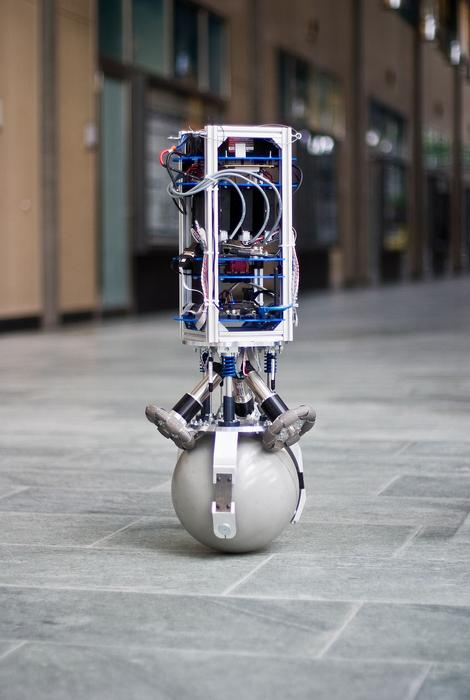
The ballbot, a robot characterized by its ball-based mobility, is unique in its ability to navigate complex terrains with flexibility and precision. However, this versatility creates inherent challenges, particularly regarding balance and stability. Traditional control systems, especially the widely-used proportional integral derivative (PID) controllers, grapple with the complexities of such movements, often resulting in instability in unpredictable environments. Advanced methods, such as sliding mode control, may mitigate some of these issues but can introduce undesired phenomena, such as chattering, which hinders performance.
Recognizing the need for a more effective solution, Dr. Nguyen’s research team has developed an innovative controller that elegantly blends the simplicity and familiarity of PID control with the adaptive learning capabilities of neural networks. The design focuses on providing a robust response to the real-time environments that ballbots must navigate, transforming how we think about controlling such robotic systems. This dual approach enhances the versatility of the controller, allowing it to adapt seamlessly to various situational dynamics.
In their groundbreaking research, they propose a unique control architecture that utilizes a radial basis function neural network (RBFNN) integrated with a novel adaptive nonlinear PID controller. This synergy presents numerous benefits, including lightweight computation and enhanced stability, which are critical for the practical application of ballbots in real-world scenarios. The adaptive control law is continuously improved during the robot’s operation, with initial settings determined through optimizing balancing composite motion. This ensures that the controller can address external forces effectively, creating a balanced symbiosis between mobility and stability.
The efficacy of the NPID-RBFNN controller has been validated through extensive simulations and practical experiments. Results reveal a notable improvement over traditional PID controllers, highlighting the controller’s superior performance in maintaining balance and stability in dynamic environments. Furthermore, the ability of the proposed technology to adapt to surface variations through self-learning means it can handle unpredictable challenges in real time, positioning it as a critical advancement in robotics engineering.
Dr. Nguyen’s research emphasizes the importance of stability, drawing upon the principles of Lyapunov’s theory to demonstrate foundational safety in robotics applications. Moreover, the development mitigates chattering, paving the way for more energy-efficient robotic systems. By optimizing energy use, this research aligns with efforts to promote sustainable practices within technology, making robots more viable options for various industries and everyday applications.
The implications of this advanced controller extend across numerous domains, with applications envisioned in assistive robotics, service robotics, and autonomous delivery systems. Dr. Nguyen discusses how ballbots equipped with this sophisticated controller could revolutionize assistive technologies, allowing robots to aid individuals with mobility challenges in navigating diverse environments. Their adaptability is particularly beneficial in places where traditional mobility aids may falter, providing users with a reliable solution during their daily routines.
Further expanding on its potential, Dr. Nguyen comments on the role of these robots in service-related settings such as hospitals and restaurants. The ability to navigate smoothly in such dynamic locations is crucial for maintaining efficiency and quality of services. As service robots become more prevalent, the NPID-RBFNN controller offers an edge in reliability and seamless integration into busy, ever-changing environments.
The study also examines how this robust controller can be pivotal in the design of delivery robots, emphasizing the need for reliable stability even in the face of disruptive elements like wind or uneven surfaces. Through self-balancing capabilities, the NPID-RBFNN controller positions delivery robots to operate efficiently, addressing challenges that could hinder the logistics industry’s growing reliance on autonomous systems.
In conclusion, the research tackles considerable challenges in controlling robotic systems, highlighting the importance of reliable technology for broader industry adoption. By minimizing unnecessary movements and chattering, the proposed controller not only optimizes energy consumption but also enhances the safety profile of ballbots, making them suitable for use in public and private spaces. Dr. Nguyen optimistically envisions that industries such as logistics, healthcare, and retail could significantly benefit from robots equipped with this innovative technology, ultimately improving service quality while lightening human workloads.
This research signifies a step toward realizing a future where robotic systems are not just efficient but seamlessly integrated into the human environment, enhancing daily life while promoting sustainable development in robotics technology. The road ahead looks promising, with future advancements on the horizon that will further harness the potential of robots in real-world applications.
Subject of Research: Not applicable
Article Title: Robust adaptive nonlinear PID controller using radial basis function neural network for ballbots with external force
News Publication Date: 1-Jan-2025
Web References: Article Link
References: DOI: 10.1016/j.jestch.2024.101914
Image Credits: Péter Fankhauser from Openverse (obtained via Creative Commons Search Repository)
Keywords: Autonomous robots, Adaptive control, Mechanical engineering, Robots and society, Human mobility, Neural networks, Health care delivery
Tags: adaptive control for dynamic environmentsadaptive neural network control systemsadvanced robotics research at Hanoi Universitybalancing techniques for robotic mobilityballbot mobility solutionsflexible navigation in mobile robotsimpact of NPID-RBFNN on robotic systemsnonlinear control methods for roboticsovercoming limitations of traditional PID controllersresilience of ballbot technologyrobotics innovations in control systemsstability challenges in ballbots
{kind=link}