Donut-shaped kirigami device enabling accurate and robust signal acquisition from the muscle
Credit: COPYRIGHT (C) TOYOHASHI UNIVERSITY OF TECHNOLOGY. ALL RIGHTS RESERVED.
A research team in the Department of Electrical and EIIRIS at Toyohashi University of Technology has developed a donut-shaped kirigami device for EMG recordings. The proposed device reduces device displacement on a large deformable muscle surface. Accurate and robust EMG recordings offer EMG signal-based human-machine interfaces that allow prosthesis control for amputees. The results of their research were published in an issue of Advanced Healthcare Materials on December 5, 2019. The article also appeared on the inside back cover.
An accurate and robust EMG signal recording is necessary in EMG signal-based human-machine interfaces to allow prosthesis control for amputees using their residual muscle. In 2017, the same research team previously proposed an electrode device using the kirigami structure for the intimate integration of the electronic device and biological tissues. (Y. Morikawa et al., 10.1002/adhm.201701100). The remarkable potential of the kirigami structure stems from its high stretchability, including its high strain ratio and small force necessary to be applied during device stretches. The kirigami structure can be stretched with a low strain force and its mechanical characteristics are similar to soft biological tissues, such as in the brain and muscles. However, it is challenging to obtain an accurate and robust bio-signal recording without displacement of the electrode. Device displacement occurs when the kirigami device is applied to biological tissues, such as the heart and muscles, which undergo large deformation.
A research team in the Department of Electrical and Electronic Information Engineering and the EIIRIS at Toyohashi University of Technology has developed donut-shaped kirigami device for EMG recording to solve the issue of device displacement during muscle deformation.
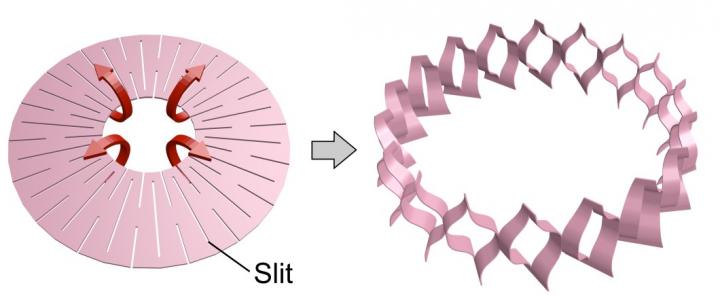
The donut-shaped kirigami structure is able to transform from a 2D donut shape to a 3D cylindrical shape. The cylindrical shape is suitable for numerous spherically or columnar-shaped deformable biological tissues (e.g. upper limb, lower limb, finger, abdomen, and heart). The donut-shaped kirigami device carries out the fixation mechanism to the target tissues and reduces the device displacement during tissue deformation with minimized stress to the biological tissue. The recording capability of the proposed device was confirmed through the EMG signal recording from the hind limb of a mouse, indicating the prospect of using the device for an EMG-based human-machine-interface.
“The first demonstration using our conventional sheet-shaped kirigami device could not follow the deformation of a beating heart. We discussed the device structure, which enables the device to follow deformable tissues. In the preliminary experiment, we used a paper, which was patterned into the proposed donut-shape of the kirigami by the box cutter, and we demonstrated its stretchable and deformable capabilities for the muscle. However, it was uncertain whether the micro-scale donut-kirigami device shows these device properties or not. We explored them through fabricating the device by using the microfabrication process and the device characterizations, and we confirmed that the fabricated device exhibited the expected deformation against our thought,” explains the first author of the article, Ph.D. candidate Yusuke Morikawa.
The donut-shaped kirigami device still needs further improvements in terms of durability and the dense array of the microelectrodes. Moreover, the influence of the device implantations to the biological tissues should be clarified if used for a long period. However, it is expected that the proposed device is applicable to an EMG based human-machine-interface and contributes to the improvement of the quality of life of amputees.
###
Funding agency
This work was supported by Grants-in-Aid for Scientific Research (B) (No. 17H03250, No. 16H05434), for Young Scientists (A) (No. 26709024), on Innovative Areas (Research in a proposed research area) (15H05917), and Strategic Advancement of Multi-Purpose Ultra-Human Robot and Artificial Intelligence Technologies program from NEDO. Y.M. was supported by the Leading Graduate School Program R03 of MEXT. R.N. was supported by Takeda Science Foundation. K.K. was supported by Toyota Physical & Chemical Research Institute Scholars.
Reference:
Yusuke Morikawa, Shota Yamagiwa, Hirohito Sawahata, Rika Numano, Kowa Koida, and Takeshi Kawano. (2019). “Donut?Shaped Stretchable Kirigami: Enabling Electronics to Integrate with the Deformable Muscle.” Advanced Healthcare Materials, 10.1002/adhm.201900939.
Media Contact
Yuko Ito
[email protected]
Related Journal Article
http://dx.



{kind=link}