The alien world of aquatic micro-organisms just got new residents: synthetic self-propelled swimming bio-bots.
A team of engineers has developed a class of tiny bio-hybrid machines that swim like sperm, the first synthetic structures that can traverse the viscous fluids of biological environments on their own. Led by Taher Saif, the University of Illinois Gutgsell Professor of mechanical science and engineering, the team published its work in the journal Nature Communications.
“Micro-organisms have a whole world that we only glimpse through the microscope,” Saif said. “This is the first time that an engineered system has reached this underworld.”
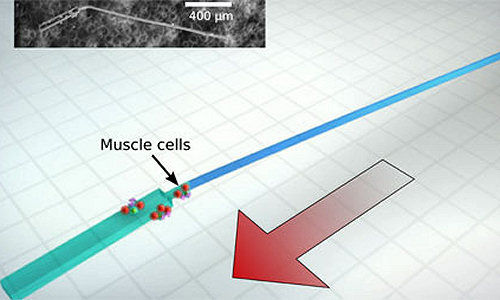
The bio-bots are modeled after single-celled creatures with long tails called flagella – for example, sperm. The researchers begin by creating the body of the bio-bot from a flexible polymer. Then they culture heart cells near the junction of the head and the tail. The cells self-align and synchronize to beat together, sending a wave down the tail that propels the bio-bot forward.
This self-organization is a remarkable emergent phenomenon, Saif said, and how the cells communicate with each other on the flexible polymer tail is yet to be fully understood. But the cells must beat together, in the right direction, for the tail to move.
“It’s the minimal amount of engineering – just a head and a wire,” Saif said. “Then the cells come in, interact with the structure, and make it functional.”
See an animation of the bio-bots in motion and a video of a free-swimming bot.
The team also built two-tailed bots, which they found can swim even faster. Multiple tails also opens up the possibility of navigation. The researchers envision future bots that could sense chemicals or light and navigate toward a target for medical or environmental applications.
“The long-term vision is simple,” said Saif, who is also part of the Beckman Institute for Advanced Science and Technology at the U. of I. “Could we make elementary structures and seed them with stem cells that would differentiate into smart structures to deliver drugs, perform minimally invasive surgery or target cancer?”
The swimming bio-bot project is part of a larger National Science Foundation-supported Science and Technology Center on Emergent Behaviors in Integrated Cellular Systems, which also produced the walking bio-bots developed at Illinois in 2012.
“The most intriguing aspect of this work is that it demonstrates the capability to use computational modeling in conjunction with biological design to optimize performance, or design entirely different types of swimming bio-bots,” said center director Roger Kamm, a professor of biological and mechanical engineering at the Massachusetts Institute of Technology. “This opens the field up to a tremendous diversity of possibilities. Truly an exciting advance.”
The alien world of aquatic micro-organisms just got new residents: synthetic self-propelled swimming bio-bots.
A team of engineers has developed a class of tiny bio-hybrid machines that swim like sperm, the first synthetic structures that can traverse the viscous fluids of biological environments on their own. Led by Taher Saif, the University of Illinois Gutgsell Professor of mechanical science and engineering, the team published its work in the journal Nature Communications.
“Micro-organisms have a whole world that we only glimpse through the microscope,” Saif said. “This is the first time that an engineered system has reached this underworld.”
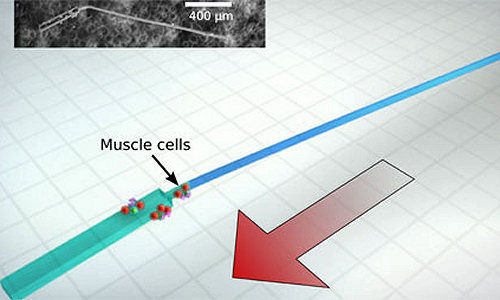
The bio-bots are modeled after single-celled creatures with long tails called flagella – for example, sperm. The researchers begin by creating the body of the bio-bot from a flexible polymer. Then they culture heart cells near the junction of the head and the tail. The cells self-align and synchronize to beat together, sending a wave down the tail that propels the bio-bot forward.
This self-organization is a remarkable emergent phenomenon, Saif said, and how the cells communicate with each other on the flexible polymer tail is yet to be fully understood. But the cells must beat together, in the right direction, for the tail to move.
“It’s the minimal amount of engineering – just a head and a wire,” Saif said. “Then the cells come in, interact with the structure, and make it functional.”
See an animation of the bio-bots in motion and a video of a free-swimming bot.
The team also built two-tailed bots, which they found can swim even faster. Multiple tails also opens up the possibility of navigation. The researchers envision future bots that could sense chemicals or light and navigate toward a target for medical or environmental applications.
“The long-term vision is simple,” said Saif, who is also part of the Beckman Institute for Advanced Science and Technology at the U. of I. “Could we make elementary structures and seed them with stem cells that would differentiate into smart structures to deliver drugs, perform minimally invasive surgery or target cancer?”
The swimming bio-bot project is part of a larger National Science Foundation-supported Science and Technology Center on Emergent Behaviors in Integrated Cellular Systems, which also produced the walking bio-bots developed at Illinois in 2012.
“The most intriguing aspect of this work is that it demonstrates the capability to use computational modeling in conjunction with biological design to optimize performance, or design entirely different types of swimming bio-bots,” said center director Roger Kamm, a professor of biological and mechanical engineering at the Massachusetts Institute of Technology. “This opens the field up to a tremendous diversity of possibilities. Truly an exciting advance.”
Story Source:
The above story is based on materials provided by University of Illinois at Urbana-Champaign.


{kind=link}