Researchers propose a single parameter that can be used to compare the locomotion of animals as disparate as large mammals and insects. Horses and mites both use legs to walk, but a horse may break a leg that unexpectedly enters a hole, whereas a hole has little effect on mite walking. The reason is the difference in the forces that dominate during locomotion at different scales and speeds. The forces that can affect a moving limb are inertia, gravity, elasticity and viscosity. In the horse, inertia dominates, and perturbations may rapidly cause disastrous changes in behavior; in contrast, in the mite, viscosity and elasticity dominate, so perturbations have minimal effects. Previous research used ratios of these forces to describe locomotion. Gregory Sutton, Nicholas Szczecinski, and colleagues combine quantitative measures for all four forces into a single dimensionless number: the phase shift () between actuator force and limb displacement, which can be expressed in terms of limb length and speed. The authors show that this parameter can be used to predict the neural control of the muscles of a wide range of animals during locomotion. The new parameter will be useful for the study of animal locomotion and the design of walking robots, according to the authors.
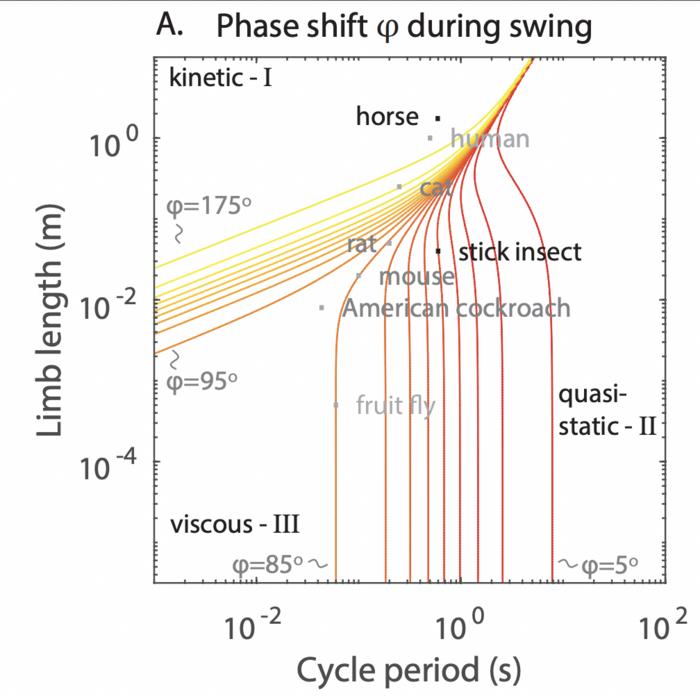
Credit: Sutton et al.
Researchers propose a single parameter that can be used to compare the locomotion of animals as disparate as large mammals and insects. Horses and mites both use legs to walk, but a horse may break a leg that unexpectedly enters a hole, whereas a hole has little effect on mite walking. The reason is the difference in the forces that dominate during locomotion at different scales and speeds. The forces that can affect a moving limb are inertia, gravity, elasticity and viscosity. In the horse, inertia dominates, and perturbations may rapidly cause disastrous changes in behavior; in contrast, in the mite, viscosity and elasticity dominate, so perturbations have minimal effects. Previous research used ratios of these forces to describe locomotion. Gregory Sutton, Nicholas Szczecinski, and colleagues combine quantitative measures for all four forces into a single dimensionless number: the phase shift () between actuator force and limb displacement, which can be expressed in terms of limb length and speed. The authors show that this parameter can be used to predict the neural control of the muscles of a wide range of animals during locomotion. The new parameter will be useful for the study of animal locomotion and the design of walking robots, according to the authors.
Journal
PNAS Nexus
Article Title
Phase shift between joint rotation and actuation reflects dominant forces and predicts muscle activation patterns
Article Publication Date
10-Oct-2023


{kind=link}