The limited ability of microrobots to assist drugs in entering cells hinders their therapeutic efficacy. To address this, the cancer-targeting molecule folic acid (FA) was introduced to microrobots to promote drug uptake by cancer cells via receptor-ligand-mediated endocytosis. This results in a drug delivery system that can locate lesion areas with magnetic fields and deliver loaded drugs into the cytoplasm through endocytosis.
Credit: Cyborg and Bionic Systems
The limited ability of microrobots to assist drugs in entering cells hinders their therapeutic efficacy. To address this, the cancer-targeting molecule folic acid (FA) was introduced to microrobots to promote drug uptake by cancer cells via receptor-ligand-mediated endocytosis. This results in a drug delivery system that can locate lesion areas with magnetic fields and deliver loaded drugs into the cytoplasm through endocytosis.
The team published their findings in the Journal of Cyborg and Bionic Systems on May 5.
Untethered microrobots have shown remarkable achievements in various fields such as minimally invasive surgery, drug delivery, environmental remediation, and tissue engineering. Magnetic field actuation is a widely used method due to its good biosafety, deeper tissue penetration, and high temporal and spatial control. However, practical problems arise when microrobots deliver drugs that may only be able to deliver the drug to the area around the cells but cannot assist drugs to enter cells. This limitation could potentially reduce the effectiveness of the treatment since the drug may not reach the intended target within the cell.
To improve the effective utilization of drugs, microrobots should be equipped with precise targeting capabilities. The researchers introduced folic acid (FA) into the microrobot to promote specific cancer cell targeting ability and drug ingestion by cells. The selective overexpression of the FR on the surface of cancer cells provides FA the ability to promote the uptake of drugs by cancer cells through receptor-ligand-mediated endocytosis.
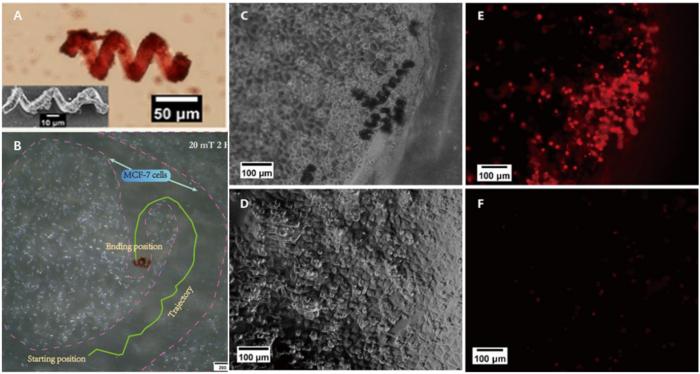
The developed magnetic microrobot system consists of biodegradable gelatin methacryloyl (GelMA)-based ABF microhelix and FA-loaded Fe@ZIF-8 (MOF) nanoparticles. Therapeutic drugs, such as DOX, can be loaded into the hydrogel network of the microrobots for cancer therapy. With the directional manipulation of an external rotating magnetic field, the microrobot can be navigated and fixed at the lesion site to ensure therapeutic drugs gather around cells. The full binding of FA on the microrobots and FR on the surface of cancer cells can trigger the occurrence of endocytosis, resulting in the entering of MOF(FA) and DOX into the cells. The accumulation of microrobots near cells improves the interaction of receptors and ligands and enhances therapeutic efficiency. The results showed that microrobots with FA showed more significant cell inhibition than those without FA. Therefore, the ABF-MOF(FA) drug delivery system, combining magnetic manipulation and the active targeting of FA, has a promising application prospect for cancer treatment.
To test the drug encapsulation capability, the release curve indicated that the microrobot based on GelMA had a certain drug encapsulation ability and drug release ability. The target ability of FA was proved by the MTT assay and the live/dead staining experiments. Moreover, motion control and cell experiments indicated the microrobots can be accurately manipulated by a magnetic field and perform specific tasks. Finally, DOX-loaded folate targeting magnetic microrobots produced an obvious anticancer effect within 24 hours after being navigated to the designated location by a magnetic field.
The folate-targeting magnetic microrobot system has great potential in cancer treatment due to its high loading capacity, controllable navigation, and ability to enhance cancer cell targeting and inhibition.
The research is funded by the Shenzhen Institute of Artificial Intelligence and Robotics for Society (AIRS), The Chinese University of Hong Kong, Shenzhen, Guangdong 518129, China
Journal
Cyborg and Bionic Systems
DOI
10.34133/cbsystems.0019

