Credit: Joe Tracy
A team of engineering researchers has made a fundamental advance in controlling so-called soft robots, using magnetic fields to remotely manipulate microparticle chains embedded in soft robotic devices. The researchers have already created several devices that make use of the new technique.
"By putting these self-assembling chains into soft robots, we are able to have them perform more complex functions while still retaining relatively simple designs," says Joe Tracy, an associate professor of materials science and engineering at North Carolina State University and corresponding author of a paper on the work. "Possible applications for these devices range from remotely triggered pumps for drug delivery to the development of remotely deployable structures."
The new technique builds on previous work in the field of self-assembling, magnetically actuated composites by Tracy and Orlin Velev, the INVISTA Professor of Chemical and Biomolecular Engineering at NC State.
For this study, the researchers introduced iron microparticles into a liquid polymer mixture and then applied a magnetic field to induce the microparticles to form parallel chains. The mixture was then dried, leaving behind an elastic polymer thin film embedded with the aligned chains of magnetic particles.
"The chains allow us to manipulate the polymer remotely as a soft robot by controlling a magnetic field that affects the chains of magnetic particles," Tracy says.
Specifically, the direction of the magnetic field and its strength can be varied. The chains of iron microparticles respond by aligning themselves and the surrounding polymer in the same direction as the applied magnetic field.
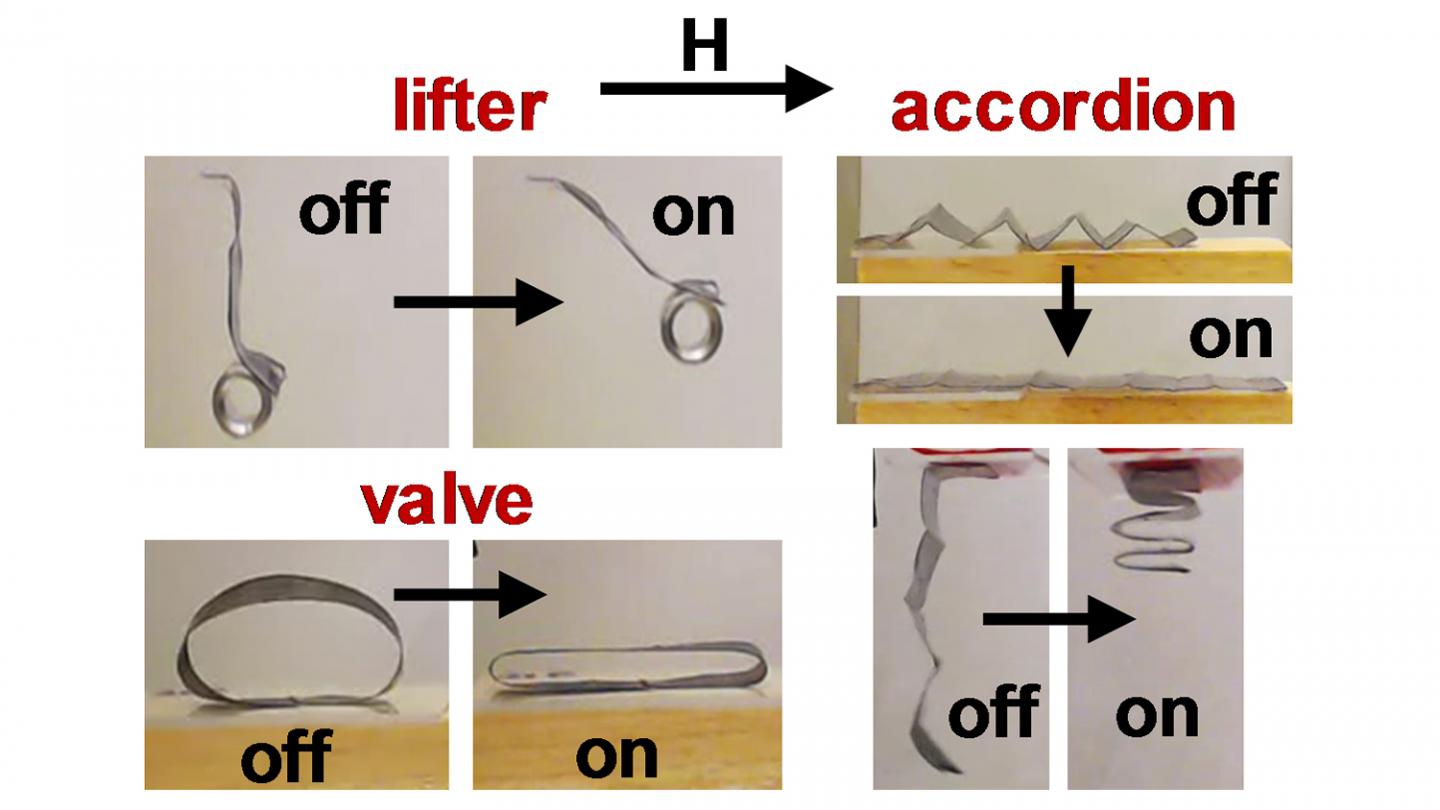
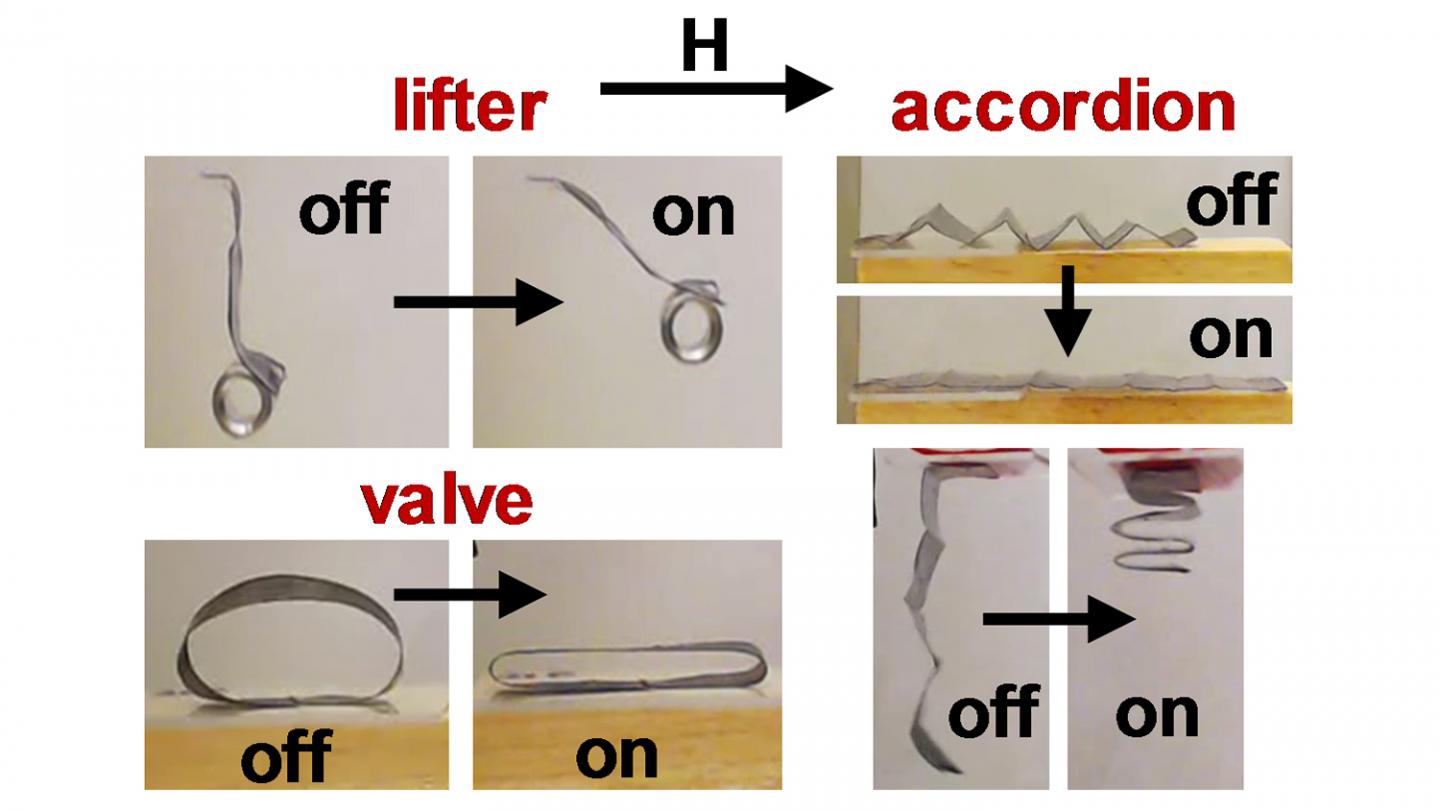
Using this technique, the researchers have created three kinds of soft robots. One device is a cantilever that can lift up to 50 times its own weight. The second device is an accordion-like structure that expands and contracts, mimicking the behavior of muscle. The third device is a tube that is designed to function as a peristaltic pump – a compressed section travels down the length of the tube, much like someone squeezing out the last bit of toothpaste by running their finger along the tube.
"We're now working to improve both the control and the power of these devices, to advance the potential of soft robotics," Tracy says.
The researchers have also developed a metric for assessing the performance of magnetic lifters, such as the cantilever device.
"We do this by measuring the amount of weight being lifted and taking into account both the mass of particles in the lifter and the strength of the magnetic field being applied," says Ben Evans, co-author of the paper and an associate professor of physics at Elon University. "We think this is a useful tool for researchers in this area who want to find an empirical way to compare the performance of different devices."
###
The paper, "Chained Iron Microparticles for Directionally Controlled Actuation of Soft Robots," is published in the journal ACS Applied Materials & Interfaces. Lead author of the paper is Marissa Schmauch, an undergraduate at the University of Tulsa who worked on the project while at NC State as part of the National Science Foundation's Research Experiences for Undergraduates program. The paper was co-authored by Velev and former NC State Ph.D. student Sumeet Mishra.
Schmauch's participation was funded by the Research Triangle MRSEC, NSF grant number DMR-1121107. The work was also supported by NSF grant number DMR-1056653.
Media Contact
Matt Shipman
[email protected]
919-515-6386
@NCStateNews
############
Story Source: Materials provided by Scienmag



{kind=link}