A paper describing the distributed cooperative control problem with the heterogeneous model structures and external disturbances for the connected vehicle (CV) platoon was published in the journal Green Energy and Intelligent Transportation on November 25th, 2022.
Credit: Dr. Yongfu Li, Key Laboratory of Intelligent Air-Ground Cooperative Control for Universities in Chongqing, Chongqing University of Posts and Telecommunications
A paper describing the distributed cooperative control problem with the heterogeneous model structures and external disturbances for the connected vehicle (CV) platoon was published in the journal Green Energy and Intelligent Transportation on November 25th, 2022.
In recent decades, the cooperative control problems of CV platoon on highways have attracted widespread interest for their significant impact on road transportation. The platoon control of CV has the advantages of improving the safety of highways, increasing the capacity of traffic, and reducing the consumption of resources. The state information of the ego vehicle can be sent to other vehicles through advanced vehicle-to-everything (V2X) communication technology. The velocity of vehicles and the distance between adjacent vehicles in the CV platoon can be ensured to be the consistent and stable state through the action of the controller.
The vehicle dynamics model includes the single integrator model, second-order model, and third-order model. The single integrator model is too simple to accurately describe the vehicle dynamics model. The second-order model does not still capture many features of real vehicle dynamics, such as inertial delays in powertrain dynamics. One modeling trend is to further increase one state to produce the third-order model. In real traffic scenarios, the vehicle platoon may be composed of vehicles with heterogeneous model structures.
The vehicle communication topology includes predecessor following (PF), predecessor-leader following (PLF), bidirectional (BD), bidirectional-leader (BDL), two-predecessors following (TPF), two predecessor-leader following (TPLF) topologies. The hierarchical framework does not need to specify the topology as a commonly used topology, such as PF and PLF topologies, etc., which is more suitable for real road scenarios.
Many works assume that the driving scene of the vehicle is under ideal conditions, so the influence of external disturbances on the CV platoon is ignored. Ignoring the influence of external disturbances may lead to instability of CV platoon and even traffic accidents. Therefore, it is necessary to take measures to address the influence of external disturbances.
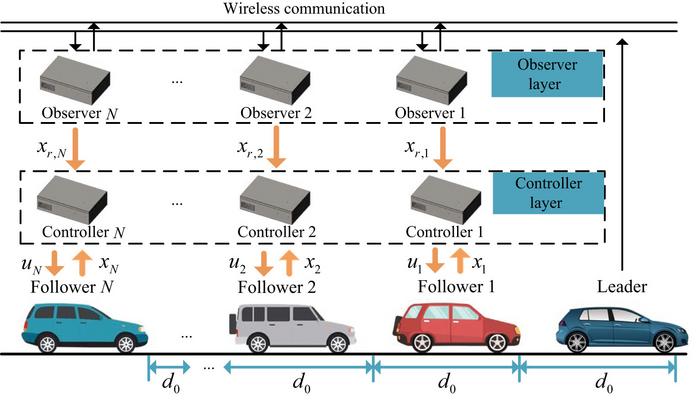
A hierarchical platoon control framework is designed, which includes an observer in the upper-level layer and an ISM controller in the lower-level layer. Through vehicle-to-vehicle communication with neighboring vehicles, the observer generates a local reference signal, i.e., the observation of the leader vehicle states. The integral sliding mode (ISM) controller generates control inputs to track the local reference signal. Particularly, this ISM controller is able to eliminate the influence of external disturbances on the CV platoon.
The researchers rigorously analyzed the stability and string stability of the CV platoon. And the effectiveness and superiority of the designed control strategy are tested through numerical simulation. The result shows that the designed control algorithm can maintain the stability of the vehicle platoon in the presence of external disturbances.
In future efforts, the researchers will consider the longitudinal and lateral coupled control of the CV platoon. In addition, communication delay and packet loss will also be considered.
***
Reference
Author: Yongfu Li a, Zongyu Qin a, Hao Zhu a, Srinivas Peeta b, Xinbo Gao a
Title of original paper: Platoon control of connected vehicles with heterogeneous model structures considering external disturbances
Article link: https://doi.org/10.1016/j.geits.2022.100038
Journal: Green Energy and Intelligent Transportation
https://www.sciencedirect.com/science/article/pii/S277315372200038X
DOI: 10.1016/j.geits.2022.100038
Affiliations:
a)Key Laboratory of Intelligent Air-Ground Cooperative Control for Universities in Chongqing, College of Automation, Chongqing University of Posts and Telecommunications, Chongqing, 400065, China
b)Schools of Civil and Environmental Engineering and Industrial and Systems Engineering, Georgia Institute of Technology, Atlanta, GA, 30332, United States of America
Journal
Green Energy and Intelligent Transportation
DOI
10.1016/j.geits.2022.100038
Method of Research
Data/statistical analysis
Subject of Research
Not applicable
Article Title
Platoon control of connected vehicles with heterogeneous model structures considering external disturbances
Article Publication Date
25-Nov-2023
COI Statement
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.

