
Navigating drones in environments devoid of reliable Global Positioning System (GPS) signals represents a formidable challenge facing modern aerospace technology. Traditional methods of aerial navigation have primarily relied on GPS, but researchers are uncovering innovative techniques for Unmanned Aerial Vehicles (UAVs) to operate effectively without this crucial element. The implications of these advancements could be transformative, particularly in applications such as disaster response and autonomous delivery services where GPS signals are hampered or entirely unavailable.
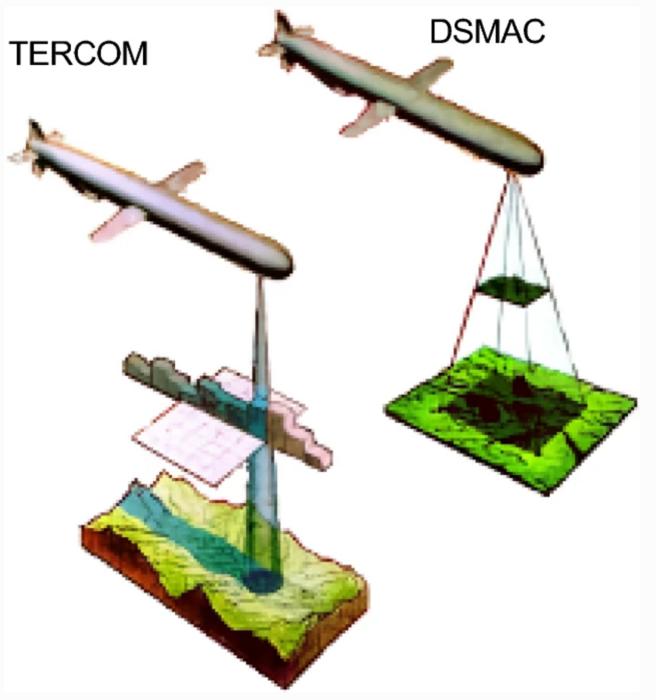
Recent studies have shed light on the efficacy of various localization techniques employed for UAVs in GPS-denied areas. A prominent focus within this field is the duality of absolute and relative localization techniques. Absolute localization, which often leans on technologies like Terrain Contour Matching (TERCOM) and Digital Scene Matching Area Correlation (DSMAC), utilizes pre-mapped terrain information to establish operational baselines. In contrast, relative localization techniques rely on real-time sensor data, employing methodologies such as Simultaneous Localization and Mapping (SLAM) and visual-inertial odometry to maintain situational awareness.
The fascinating aspect of TERCOM is its ability to leverage known topographical data to navigate through complex terrains. This method requires an accurate repository of geographical data, allowing UAVs to compare their current position against established maps. Although TERCOM demonstrates effectiveness in areas abundant with distinctive terrain features, it falls short in featureless environments, which often exist in urban or monotonous landscapes. Here, DSMAC shines, offering a more adaptive approach by contrasting real-time sensor data with stored database information, making it better suited for dynamic environments where features may change rapidly.
The current exploration into vision-based navigation systems further emphasizes the shift towards incorporating hybrid methodologies that marry various sensors and algorithms to bolster UAV navigation. The prospect of integrating multiple sensing modalities into a single harmonious framework could significantly address the inherent limitations of relying solely on GPS. This multi-faceted approach encourages the development of comprehensive systems that can seamlessly adjust to varying operational contexts.
Another contributing factor to this evolving field of study is the pressing demand for autonomous UAV operations in environments that could be utterly netted by GPS jamming or obstruction. Drones are increasingly tasked with crucial missions in scenarios such as search-and-rescue operations or delivering medical supplies to remote regions. Reliable navigational frameworks that operate independently of GPS are not only advantageous but essential in these extreme situations. Recognizing the environmental complexities where UAV operations occur is vital for developing systems that can overcome connectivity disruptions.
To further this discourse, a recent review encompassing 132 research papers delves into the intricacies of localization methodologies for UAV navigation. The comprehensive nature of this review provides a deep dive into both absolute and relative localization techniques with an emphasis on vision-assisted systems, LiDAR, and terrain-aided algorithms. By scrutinizing computational efficiencies, the research emphasizes the growing consensus on the effectiveness of hybrid approaches, cementing them as a cornerstone for dependable UAV navigation.
In the realm of real-time processing, the study highlights the crucial role of hardware accelerators such as GPUs, implementing techniques optimized for prompt data analysis and decision-making. The integration of advanced algorithms like Long Short-Term Memory (LSTM) networks enhances the ability to process temporal data more efficiently while ensuring that UAVs can navigate in highly dynamic settings. The prospect of using edge computing, which brings processing capabilities closer to data sources, could also mitigate latency issues prevalent in traditional cloud computing setups.
However, the research does not shy away from addressing the challenges that persist within the context of sensor integration. Lighting conditions have proven to be a considerable obstacle for vision-based systems, necessitating ongoing improvements and refinements. The adaptability of various localization techniques must be further explored to ensure they can provide effective solutions across a diverse spectrum of environments. The interplay of drone technology and AI capabilities is likely to accelerate innovation within this space, pushing the boundaries of what’s possible in UAV navigation.
Additionally, a concerted emphasis on regulatory frameworks is paramount in facilitating a smooth transition to decentralized navigation systems. As UAVs become increasingly integral to various sectors—ranging from agriculture and logistics to defense—establishing standardized practices and protocols will be critical to their continued success. By ensuring that systems are safe and efficient, stakeholders can harmonize the integration of these technologies into future urban infrastructures and smart city frameworks.
Dr. Imen Jarraya, the lead author of the study, remains optimistic about the advancements in UAV navigation. He acknowledges that hybrid systems combining absolute and relative localization hold the key to successful navigation in GPS-denied zones. He further stresses the importance of future research focusing on optimizing these frameworks to ensure UAVs operate reliably, regardless of the unpredictability of their environments.
In conclusion, the ongoing discourse surrounding UAV localization techniques prompts a broader reflection on the future of aerial navigation. The integration of innovative technologies and methodologies signifies a substantial leap forward, suggesting a paradigm shift in how we perceive drone operations in complex environments. There’s a collective sense of urgency to refine these systems and ensure their readiness for practical applications across diverse sectors. As such, the potential for enhanced operational capabilities in situations previously constrained by GPS dependency serves as an encouraging driving force for continued research and development.
Subject of Research:
Article Title: Gnss-denied unmanned aerial vehicle navigation: analyzing computational complexity, sensor fusion, and localization methodologies
News Publication Date: 7-Apr-2025
Web References: Satellite Navigation Journal
References: DOI: 10.1186/s43020-025-00162-z
Image Credits: Satellite Navigation
Keywords
Applied sciences, UAV navigation, GPS denial, sensor fusion, localization techniques, hybrid approaches.
Tags: absolute versus relative localization for dronesadvancements in aerospace technologyautonomous delivery services without GPSchallenges of GPS-denied drone operationsDigital Scene Matching Area Correlation applicationsdisaster response UAV technologyeffective navigation strategies for dronesinnovative drone localization techniquesSimultaneous Localization and Mapping for dronesTerrain Contour Matching for UAVsUAV navigation in GPS-denied environmentsvisual-inertial odometry in aerial navigation


{kind=link}