Credit: @Science China Press
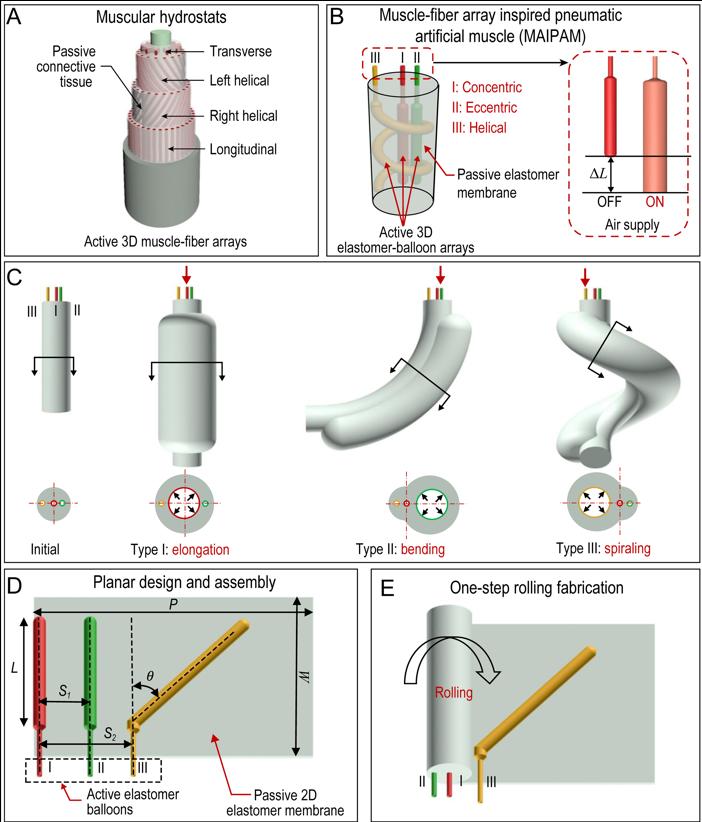
Biological organisms (such as elephant trunks, octopus tentacles, and human tongues) show remarkable dexterity and self-adaptation in unstructured environments, relying on the multiple-mode actuations of the skeleton-free muscular hydrostats. In general, muscular hydrostats mainly consist of well-ranged active 3D muscle-fiber arrays bundled by passive connective tissues (Fig. 1A). By selectively actuating the active 3D muscle-fiber arrays, muscular hydrostats can generate elongation, bending, contraction and twisting. Producing such multiple-mode actuation of muscular hydrostats is an interesting but long-lasting challenge in the field of robotics.
During past decades, many artificial muscles (such as dielectric elastomer actuators, pneumatic elastomer actuators, shape memory alloy/polymers) have been well developed to generate various actuations, which have been widely used in soft robotic systems. However, existed artificial muscles usually suffer from single actuation mode, such as elongation, bending, contraction, or twisting. Therefore, the development of artificial muscles with multiple-mode actuations remains elusive.
To address this challenge, inspired by the 3D muscle-fiber arrays in muscular hydrostats, a group from Shanghai Jiao Tong University, led by Professors Guoying Gu and Xiangyang Zhu, reported a class of multiple-mode pneumatic artificial muscles, called MAIPAMs, that are capable of multiple-mode actuations, like muscular hydrostats. The MAIPAMs mainly consist of active 3D elastomer-balloon arrays bundled by a passive elastomer membrane (Fig. 1B). When the compressed air is applied, each active elastomer balloon can generate an elongation while the passive elastomer membrane can transform the elongation into multiple-mode actuations, including elongation, bending, and spiraling (Fig. 1C). For the design and fabrication, a planar design and one-step rolling fabrication approach (Fig. 1D-E) is proposed to build the active 3D elastomer-balloon arrays of the MAIPAMs. In this sense, different MAIPAMs can be created to achieve complex actuation modes, such as parallel elongation-bending-spiraling actuations, parallel 10 bending actuations for omnidirectionally recording videos in a confined space, and cascaded elongation-bending-spiraling actuations for gripping. Owing to the scalable advantages of the planar design and rolling fabrication approach, MAIPAMs can also integrate limiting layers for contraction and twisting actuation modes, or compliant electrodes for self-sensing. They finally demonstrate that the MAIPAMs shows promising potentials in the field of soft robotics, such as detecting environments, manipulating or gripping objects, and climbing inside a pipe-line.
###
This research received funding from the National Natural Science Foundation of China, the Science and Technology Commission of Shanghai Municipality, and the China Postdoctoral Science Foundation.
See the article:
Jiang Zou, Miao Feng, Ningyuan Ding, Peinan Yan, Haipeng Xu, Dezhi Yang, Nicholas X Fang, Guoying Gu, and Xiangyang Zhu
Muscle-fiber array inspired, multiple-mode, pneumatic artificial muscles through planar design and one-step rolling fabrication
National Science Review, 2021, nwab048, https:/
The National Science Review is the first comprehensive scholarly journal released in English in China that is aimed at linking the country’s rapidly advancing community of scientists with the global frontiers of science and technology. The journal also aims to shine a worldwide spotlight on scientific research advances across China.
Media Contact
Guoying Gu
[email protected]
Original Source
http://doi.
Related Journal Article
http://dx.


{kind=link}