All-round grippers capable of working with various objects. Robotic manipulation of everyday tools boosts non-face-to-face services
Credit: The Korea Institute of Machinery and Materials (KIMM)
The Korea Institute of Machinery and Materials (KIMM) successfully developed all-round gripper* technology, enabling robots to hold objects of various shapes and stiffnesses. With the new technology, a single gripper can be used to handle different objects such as screwdrivers, bulbs, and coffee pots, and even food with delicate surfaces such as tofu, strawberries, and raw chicken. It is expected to expand applications in contact-free services such as household chores, cooking, serving, packaging, and manufacturing.
*Gripper: A device that enables robots to hold and handle objects, similar to a human hand.
The team led by Chanhun Park of the Department of Robotics and Mechatronics under the Advanced Manufacturing Systems Research Division developed all-round grippers that facilitate contact-free services. Contact-free services require gripper technology for robots to freely handle objects regardless of object shape and material.
The all-round gripper was developed to hold objects of various shapes, sizes, and stiffnesses. The stiffness of the gripper surface in contact with the object is soft and fluffy enough to be similar to that of a tofu. This extremely low stiffness can inherently prevent damage to the object. In addition, only the area pressed by the object is selectively deformed, so the contact surface of the gripper can be deformed to perfectly match the target object contour, and this can help to realize firm grip.
“The soft structure technology allows the gripper surface to perfectly match target objects in extremely soft state using the honeycomb structure and stretchable mesh structure,” said Sung-hyuk Song, senior researcher in charge of developing the gripper surface structure.
After the grabbing action, the gripper surface hardens, keeping the object stable in its grip. This feature allows it to safely hold objects, including those with fragile surfaces. The sense of stability provided by the gripper is such that users will feel as if it has been customized for the specific object.
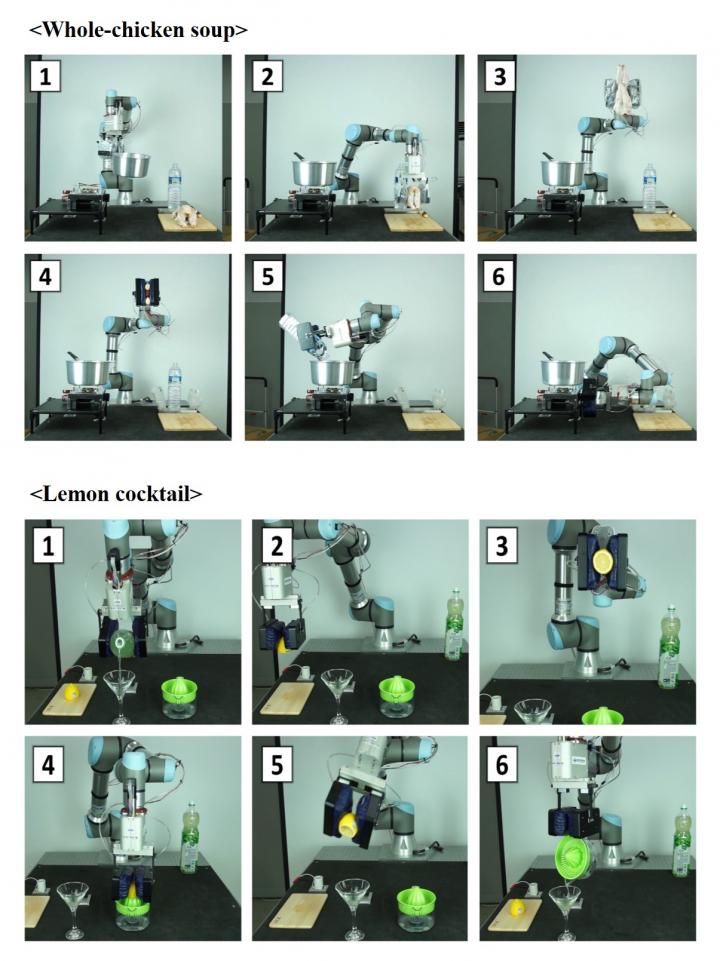
The all-round gripper can hold a target object firmly instead of leaving it hanging unstably, so the gripper has the advantage of being able not only to transfer objects but also to perform complex tasks such as preparing a cocktail with a squeezed lemon, making chicken soup, and cooking a squid dish, none of which were possible to implement with existing grippers.
“Conventional grippers are applicable to only a few objects, but our all-round grippers can be applied to various objects of different shape and size, because the gripper’s surface shape and rigidity can be transformed according to the target object. We hope the developed all-round gripper plays a key role in the advancement of contact-free services, where there is much need for innovation in gripper technology,” said Chanhun Park, the head of the Department of Robotics and Mechatronics.
###
The study was conducted as part of the project titled “Development of Highly Efficient and Safe Industrial Manipulator for Human-robot Collaboration.”
The Korea Institute of Machinery and Materials (KIMM) is a non-profit government-funded research institute under the Ministry of Science and ICT. Since its foundation in 1976, KIMM has been contributing to the economic growth of the nation by performing R&D on key technologies in machinery and materials, conducting reliability test evaluation, and commercializing developed products and technologies.
The research, backed by the Ministry of Science and ICT (MSIT), was conducted by KIMM. An article explaining the results of this research was published in the latest issue of IEEE Transactions on Industrial Electronics, the top 1.6% (rank 1/64) international journal in the INSTRUMENTS & INSTRUMENTATION field (IF:7.515). (DOI: 10.1109/TIE.2020.3044811)
Media Contact
Ms. Jihyeon Seo, Team Leader, Dept. of External Relations
[email protected]
Related Journal Article
http://dx.



{kind=link}