It is an inevitable choice for the development of space automation technology to use space intelligent robots to realize space exploration and space resource utilization. China started with the successful launch of the Tianhe Core Module in 2021, and intends to build a large-scale, long-term manned national space laboratory during 2021-2022, and gradually develops into the China’s Space Station (CSS), which raises more requirements to develop the space intelligent robot technology. However, the harsh space environment, including microgravity, complex illumination, and strong radiation in space, poses challenges for space robots in large-range stable motion, high-precision dexterous and safe manipulation, precision sensing and high-precision measurement. In a research paper recently published in Space: Science & Technology, Xiao Huang from Beijing Institute of Technology reviewed, analyzed and summarized the technical progress and future development trend of space intelligent robots for the on-orbit operation requirements of space stations, satellites and large space structures.
Credit: Space: Science & Technology
It is an inevitable choice for the development of space automation technology to use space intelligent robots to realize space exploration and space resource utilization. China started with the successful launch of the Tianhe Core Module in 2021, and intends to build a large-scale, long-term manned national space laboratory during 2021-2022, and gradually develops into the China’s Space Station (CSS), which raises more requirements to develop the space intelligent robot technology. However, the harsh space environment, including microgravity, complex illumination, and strong radiation in space, poses challenges for space robots in large-range stable motion, high-precision dexterous and safe manipulation, precision sensing and high-precision measurement. In a research paper recently published in Space: Science & Technology, Xiao Huang from Beijing Institute of Technology reviewed, analyzed and summarized the technical progress and future development trend of space intelligent robots for the on-orbit operation requirements of space stations, satellites and large space structures.
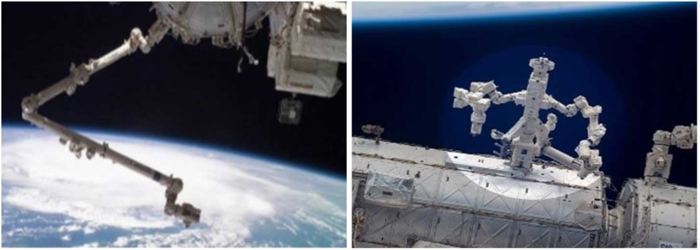
The author first focused on the space intelligent robots for space station applications. The space manipulators, including Canadarm II and the Chinese robotic manipulator system, are investigated. On the other hand, since controlling robots like astronauts to perform human-like movements and operations becomes an effective way to assist or replace astronauts, the robot astronauts have been listed as one of the key development directions of space intelligent robots. However, it is difficult to carry out a wide range of stable movements and safe dexterous manipulation in a small microgravity space, and it is also difficult to effectively verify the 3D motion of the robot astronaut on the ground. Therefore, how to form a parameterized representation of the law and study the theory of motion planning and control adapted to space environment is a scientific problem that needs to be solved urgently about robot astronauts. Meanwhile, machine vision is an important basis for robotic manipulation. However, there is a strong contrast between the shadow area and the illuminated area in the space, and the mirror-like coating of the space device may cause multiple refraction and reflection of light, high-energy particle radiation and other complex interference environments, which seriously interfere with the features of the operating objects and challenge the existing image processing algorithms.
Afterwards, the investigations about space intelligent robot for on-orbit maintenance of satellites are conducted. “Orbital Express” focusing on cooperative space objects as well as the “Phoenix Spacecraft Servicing Program” concerning non-cooperative space objects are analyzed, respectively. According to the analysis about the current researches, considering the harsh space environment of high-speed flight and microgravity, the author concluded the key technologies to support the on-orbit service as follows: the design of high-precision rigid-flexible coupling manipulators, the technology of precise safe and dexterous manipulation, the technology of multi-robot collaborative control, the technology of rapid tool change and tooling system design, the technology of the modular satellites and cellular satellites.
Finally, the author discussed the current developments of space intelligent robots for on-orbit assembly of space-oriented large-scale structures. Four typical space robots or robotic projects are mentioned to show the growing trends of related technologies. (a) The Skyworker, a robot designed by Carnegie Mellon University, is an attached mobile robot that can move by applying a reaction force to objects without grabbing hooks or handrails. Skyworker mainly serves the transportation, assembly and maintenance tasks of large payloads, such as on-orbit assembly of solar cell arrays. (b) SpiderFab project, which is proposed by Tethers Unlimited, Inc. of America in 2012, mainly uses the 3D printer and materials carried by the multi-arm space robot to print large trusses on orbit and assemble them on orbit to form a large-scale system. (c) The James Webb Space Telescope (JWST) is a giant space telescope jointly developed by several aerospace agencies to enable a broad range of investigations across the fields of astronomy and cosmology. (d) Chinese scientists have proposed the design scheme of two-stage symmetric reflected space-based solar power stations (SSPS) and the concept design on multi-rotary joints SPS. Overall, space large-aperture antennas, large-aperture space telescopes, and large-scale solar power stations are of great significance to human beings for space exploration and space resource utilization. However, due to the limitation of the size of the carrier and the rocket carrying capacity, it is difficult to launch the large-scale structure directly into the space, and it is also difficult for astronauts to carry out on-orbit assembly of large-scale spacecraft due to physiological limitations. Therefore, the author concluded the core technologies to support the on-orbit construction, such as large inertia load handling system, large-range fast and stable moving mechanism, micro-nano high-precision space measurement system and special tools and systematic equipment.
###
Reference
Journal: Space: Science & Technology
Title of original paper: Progress and Development Trend of Space Intelligent Robot Technology
Authors: Zhihong Jiang,1,2,3 Xiaolei Cao,1,2,3 Xiao Huang,1,2,3 Hui Li,1,2,3 and Marco Ceccarelli4
Affiliations:
1School of Mechatronic Engineering, Beijing Institute of Technology, Beijing 100081, China
2Advanced Innovation Center for Intelligent Robots and Systems, Beijing Institute of Technology, Beijing 100081, China
3Key Laboratory of Biomimetic Robots and Systems of Chinese Ministry, Beijing Institute of Technology, Beijing 100081, China
4Department of Industrial Engineering, University of Rome Tor Vergata, Via del Politecnico 1, 00133 Roma, Italy
DOI: doi.org/10.34133/2022/9832053
About Prof. Zhihong Jiang
Professor of Center of Advanced Intelligent Robot and System Innovation, Beijing Institute of Technology. He is also a senior member of the Chinese Society of Artificial Intelligence and assessment expert for the manipulator on Tiangong Space Station of China. He is the leading director of several national key research projects for intelligent robot development.
Journal
Space: Science & Technology
DOI
10.34133/2022/9832053
Method of Research
Experimental study
Subject of Research
Not applicable
Article Title
Progress and Development Trend of Space Intelligent Robot Technology
Article Publication Date
25-Jan-2022
COI Statement
The authors declare that they have no conflicts of interest.

