A spacecraft attitude kinematics model, attitude measurement model, and filter algorithm are three important parts in spacecraft attitude determination, and a high-precision filtering algorithm is the key to attitude determination. The classical sigma-point Kalman filter (SPKF) is widely used in a spacecraft state estimation area with the Gaussian white noise hypothesis. Although the SPKF algorithm performs well in ideal Gaussian white noise, the actual operating conditions of the spacecraft in orbit are complicated. Space environmental interference, solar panel jitter, and flicker noise will make the noise no longer meet the Gaussian distribution and present a heavy-tailed non-Gaussian situation, where the classical SPKF filtering method is no longer applicable, and there will be obvious accuracy degradation or even filtering divergence. In a research paper recently published in Space: Science & Technology, a joint team from the Army Engineering University of PLA and Chinese Academy of Military Science, proposed a robust Centered Error Entropy Unscented Kalman Filter (CEEUKF) algorithm by combining the deterministic sampling criterion with the centered error entropy criterion.
Credit: Space: Science & Technology
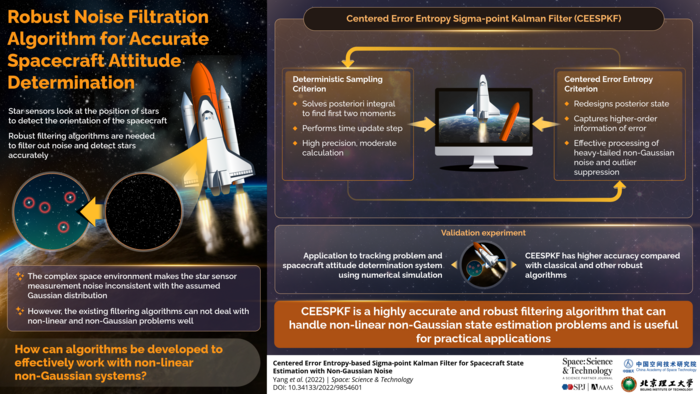
A spacecraft attitude kinematics model, attitude measurement model, and filter algorithm are three important parts in spacecraft attitude determination, and a high-precision filtering algorithm is the key to attitude determination. The classical sigma-point Kalman filter (SPKF) is widely used in a spacecraft state estimation area with the Gaussian white noise hypothesis. Although the SPKF algorithm performs well in ideal Gaussian white noise, the actual operating conditions of the spacecraft in orbit are complicated. Space environmental interference, solar panel jitter, and flicker noise will make the noise no longer meet the Gaussian distribution and present a heavy-tailed non-Gaussian situation, where the classical SPKF filtering method is no longer applicable, and there will be obvious accuracy degradation or even filtering divergence. In a research paper recently published in Space: Science & Technology, a joint team from the Army Engineering University of PLA and Chinese Academy of Military Science, proposed a robust Centered Error Entropy Unscented Kalman Filter (CEEUKF) algorithm by combining the deterministic sampling criterion with the centered error entropy criterion.
First of all, the author introduced the classical SPKF algorithm and CEE criterion. The Kalman filter (KF) is the optimal filter with the linear Gaussian framework. However, actual systems are often nonlinear systems, and there is no optimal filtering algorithm for nonlinear systems. Only approximate methods can be used for the nonlinear Gaussian systems. The nonlinear filtering algorithm based on deterministic sampling criterion has high precision than the linearization of nonlinear function. The classical deterministic sampling nonlinear Gaussian filtering methods are unscented Kalman filter (UKF), cubature Kalman filter (CKF), and central differential Kalman filter (CDKF). Since these methods involve the sampling of deterministic points, the author called them SPKF methods. Furthermore, the typical UT method was used, and the UKF is reviewed. Classical UKF used the UT method to get sampling points and approximate the state mean and error covariance of a probability density function (PDF). The UKF method was easier to approximate PDF than a nonlinear function. Time update step and measurement update step were contained in it. Next, the author took the weighted combination of the maximum correntropy (MC) and the minimum error entropy (MEE) as the expression of CEE, which had been verified to be more robust than MEE and MC criteria.
Then, the author derived the centered error entropy-based UKF (CEEUKF) by the CEE criterion and was committed to extending this algorithm to nonlinear and non-Gaussian fields. The CEEUKF contained time and measurement update steps. For the nonlinear system, the time update of the CEEUKF algorithm was the same as the classical UKF algorithm, where the sigma-point sampling methods were used to perform time update step. The new measurement update step was designed based on two main works. One is the establishment of the augmented model and the other is posterior state estimation by the CEE criterion. Because the higher-order information of the error was captured by the CEE criterion, CEESPKFs should be more robust to deal with non-Gaussian noise than CEEKF.
Afterwards, the application to the spacecraft attitude determination system verified the author’s theory. The author first introduced the gyro model, attitude determination system model, and measurement model. Then, classical UKF, maximum correntropy unscented Kalman filter (MCUKF), and the minimum errorentropy unscented Kalman filter (MEEUKF) and the proposed CEEUKF were used to perform simulation. In Gaussian noise, the filtering accuracy of CEEUKF and MCUKF was close to that of the classical UKF method. The filtering accuracy of MEEUKF was poor due to its instability. In non-Gaussian noise, the proposed CEEUKF algorithm had the highest filtering accuracy than the classical UKF and other robust algorithms. Besides, the CEEUKF also had the fastest convergence rate. The filtering results of traditional UKF had the lowest filtering accuracy, and some large estimated errors occurred at different times. The MCUKF had better filtering effect than the traditional UKF, but it was poor than the proposed CEEUKF. In conclusion, compared with the existing algorithms, CEEUKF showed its excellent performance under the proper choice of kernel bandwidths in the simulation of the spacecraft attitude estimation system.
Reference
Author: Baojian Yang, Hao Huang, and Lu Cao
Title of original paper: Centered Error Entropy-Based Sigma-Point Kalman Filter for Spacecraft State Estimation with Non-Gaussian Noise
Article Link: http://doi.org/10.34133/2022/9854601
Journal: Space: Science & Technology
Affiliations: Department of Vehicle and Electrical Engineering, Shijiazhuang Campus, Army Engineering University of PLA, Shijiazhuang 050003, China
National Innovation Institute of Defense Technology, Chinese Academy of Military Science, Beijing 100071, China
Journal
Space Science & Technology
DOI
10.34133/2022/9854601
Article Title
Centered Error Entropy-Based Sigma-Point Kalman Filter for Spacecraft State Estimation with Non-Gaussian Noise
Article Publication Date
29-Jul-2022



{kind=link}