Overview
Credit: COPYRIGHT (C) TOYOHASHI UNIVERSITY OF TECHNOLOGY. ALL RIGHTS RESERVED.
Overview
A research team led by Professor Kaiji Sato (Robotics and Mechatronics Laboratory, Department of Mechanical Engineering, Toyohashi University of Technology) revealed a method for designing with ease an ultra-precise positioning control system on the order of 10 nm, even if the dynamic model and model parameters of the motion mechanism and the machine base on which it is installed are unknown. This design method provides the control system having an NCTF controller that compensates unknown nonlinear characteristics including frictional characteristics and reaches the target position with high speed and high precision and a vibration suppression compensator that quickly compensates for unknown vibration characteristics caused by high-speed driving. Its design is simple, and it can be designed without expertise with control system design or mechanical property information.
Details
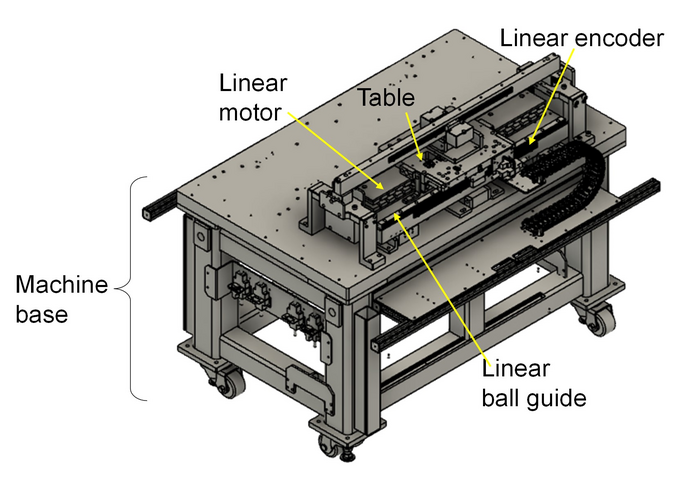
In industrial machinery such as machine tools and semiconductor manufacturing equipment, the positioning accuracy and high-speed response of the mechanism are basic and important characteristics that affect the performance of the equipment. However, as the required accuracy becomes higher, the micro-dynamic characteristics caused by the mechanism and the machine base on which it is placed (which were not previously problematic) become problematic. A high-speed response generates a large reaction force, which excites each part of the mechanism. The use of active damping devices and hardware improvements is effective in suppressing micro-vibration, but they limit the scope of application and increase costs. Using a controller that uses detailed mechanical property information is also effective, but it requires more labor and time, and an expert must be asked for adjustment. Therefore, we propose a method to effectively suppress vibration and achieve ultra-precision positioning by using the hardware as it is, without the need for mechanical property information in advance, and by simple controller design and adjustment.
The control system consists of Nominal Characteristic Trajectory Following (NCTF) proposed by Professor Sato and the vibration suppression compensator consisting of a bandpass filter and a differential compensator, and is determined sequentially. The role of the compensator is straightforward, there are few variables to adjust, and it is easy to determine without expert knowledge. The former can be designed by incorporating an open-loop response waveform for a given input signal and adjusting the two gains step-by-step. The latter is completed by determining the two gains sequentially. The resulting control system achieves ultra-precise positioning even for mechanisms with marked nonlinear characteristics such as frictional characteristics. The latter can also be used in combination with other control systems. The effectiveness of the proposed control system design method has been demonstrated by experiments.
Development Background
There is increasing demand for high acceleration, high speed, and improved accuracy in industrial machinery, making it an important issue when developing high-performance industrial machinery. This research was carried out jointly by Professor Kaiji Sato who wants to make use of the insights of his university laboratory in the real world and NEOMAX Engineering which wants to solve problems in cooperation with universities. This paper shows the achievement of the original goal and the basic results.
Future Outlook
In the paper, the control system is adjusted to suppress two types of vibration with different properties. There are also scenarios where vibration with many different frequencies occurs, scenarios where the criteria of the vibration to be suppressed are different, and scenarios where the nature of the vibration is different. We want to increase the number of scenarios we can handle, and eventually reveal how to solve these problems holistically.
Reference
Kairi Sato, Ryouhei Hisamatsu, Kaoru Akamatsu (2023). Controller design for high-speed, ultra-precision positioning of a linear motion stage on a vibrating machine base stage control on a vibrating base. Precision Engineering,
Doi: https://doi.org/10.1016/j.precisioneng.2022.11.008
Journal
Precision Engineering
DOI
10.1016/j.precisioneng.2022.11.008
Method of Research
Experimental study
Subject of Research
Not applicable
Article Title
Controller design for high-speed, ultra-precision positioning of a linear motion stage on a vibrating machine base stage control on a vibrating base
Article Publication Date
20-Nov-2022

