
In the dynamic landscape of agricultural technology, the quest to automate fruit harvesting has presented persistent challenges. Traditional manual picking, while flexible, remains labor-intensive and costly, creating inefficiencies in orchard management. Conversely, fully automated robots face significant hurdles in accurately identifying fruit amidst complex natural environments and executing delicate harvesting motions without damaging produce. Bridging this gap between human dexterity and robotic precision has long been a coveted goal in agricultural engineering.
A breakthrough has emerged from Southwest University under the guidance of Associate Professor Pei Wang and his research team, who have developed a pioneering human-robot collaborative fruit harvesting system. This novel robot leverages motion-sensing technology to interpret human hand gestures, enabling operators to control robotic arms with seamless precision simply through intuitive waving motions. Published in Frontiers of Agricultural Science and Engineering, this work promises to transform manual fruit picking into a high-efficiency, low-barrier activity for orchardists worldwide.
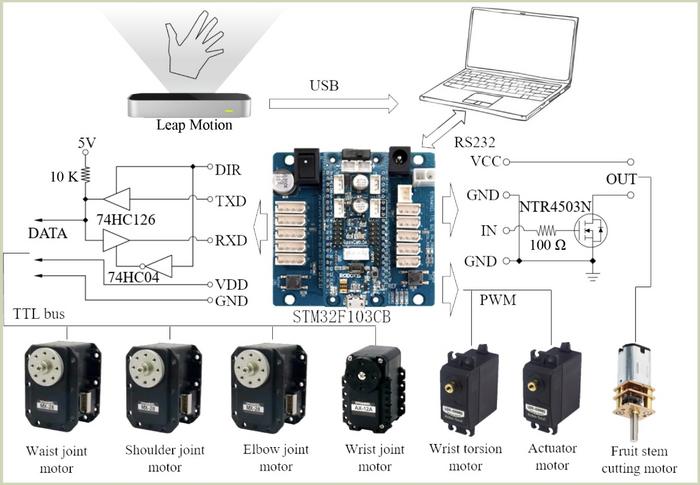
Central to their innovation is the concept of “human-machine division of labor.” Instead of automating the entire picking process, the system capitalizes on human strengths in visual perception and complex spatial reasoning, while robots handle repetitive and strenuous physical tasks. Using a Leap Motion sensor, the operator’s hand movements are captured in real time with remarkable accuracy, allowing the robotic arm to move responsively to targeted fruit. A double-tap gesture then triggers the automated picking mechanism, marrying human intent with mechanical execution flawlessly.
.adsslot_2O6RxzbSsB{width:728px !important;height:90px !important;}
@media(max-width:1199px){ .adsslot_2O6RxzbSsB{width:468px !important;height:60px !important;}
}
@media(max-width:767px){ .adsslot_2O6RxzbSsB{width:320px !important;height:50px !important;}
}
ADVERTISEMENT
The robotic arm’s precision was not without significant technical challenges, particularly in solving inverse kinematics—a mathematical approach to calculating the necessary joint configurations for the arm to reach a given point in space. Since multiple joint angle solutions may exist, abrupt and erratic movements can occur. To rectify this, the research team formulated a “four-step screening method,” designed to evaluate and select the safest and most efficient joint angles. This approach involves checking for mechanical interference, validating the feasibility of movements, ensuring rational motion patterns, and optimizing trajectory smoothness. Simulations demonstrated that this strategy markedly reduced abrupt joint rotations and shortened the robotic arm’s travel paths, resulting in inherently smoother operations.
In contrast to conventional fruit-picking robots that predominantly rely on camera-based fruit recognition systems vulnerable to environmental variability, this robot introduces seamless “intuitive control” through high-fidelity gesture sensing. The Leap Motion controller achieves submillimeter spatial resolution—0.01 millimeters—enabling robust performance even under challenging conditions such as uneven natural light or dense foliage. Additionally, sophisticated filtering algorithms were integrated to mitigate noise and jitter caused by slight hand tremors or external interference, ensuring fluid, smooth responses from the robotic arm.
A particularly ingenious aspect of this technology is its dynamic mapping of Leap Motion’s cubic interaction space to the robotic arm’s fan-shaped operational zone. Operators interact within a virtual three-dimensional box, manipulating their hand movements naturally while the robotic arm translates these into precise physical movements in the real orchard environment. This design mimics the user-friendly experience of motion-controlled gaming, drastically reducing the learning curve and increasing user engagement.
Performance evaluations revealed impressive metrics: the system exhibited an average response time of just 74.4 milliseconds and managed to recognize gestures with 96.7% accuracy. These technical achievements translated into tangible operational improvements; after minimal operator training, fruit picking times decreased from 8.3 seconds per fruit to 6.5 seconds, underscoring notable gains in efficiency. Importantly, this system shines in scenarios such as high-altitude harvesting, where manual labor typically involves risky climbing—here, the robot obviates such hazards by extending reach safely and precisely.
Unlike many existing agricultural robots that depend heavily on costly and complex vision systems, this motion-sensing approach dramatically lowers technical barriers and enables practical usability. Its modular robotic arm design allows for convenient replacement and upgrading of joint motors, enhancing maintainability and adaptability in diverse orchard settings. The system’s robustness was further validated across rugged terrains and small-scale orchard operations, where it demonstrated superior adaptability to challenges including dense foliage occlusion and variable lighting conditions.
Moreover, the fusion of human intuition and robotic consistency is emblematic of a broader trend toward human-robot synergy in agricultural automation. By preserving the operator’s ability to make rapid judgment calls and spatial assessments, the robot augments rather than replaces human expertise. This synergy optimizes harvesting workflows by capitalizing on the unique strengths of both participants—the operator’s cognitive flexibility and the machine’s mechanical stability—thereby unlocking new potentials in precision agriculture.
The implications of this innovation extend beyond mere productivity. By democratizing advanced robotic technologies through intuitive control interfaces and modular mechanical structures, the agricultural sector gains tools that are not only economically accessible but also readily adaptable to varying orchard configurations and crop types. This may foster broader adoption of automated harvesting solutions among smallholder farmers, catalyzing a gradual but profound transformation toward intelligent, sustainable farming.
This study signifies a crucial step in overcoming longstanding barriers to robotic fruit harvesting. It demonstrates that through intricate algorithmic design, real-time motion capture, and thoughtful human-machine interaction models, it is possible to create tools that seamlessly integrate with natural agricultural practices. The future of fruit picking may well lie in such hybrid systems where machines amplify human capabilities, ensuring higher yields, quality preservation, and safer working conditions.
As the fruit harvesting robot progresses toward commercialization, ongoing research is expected to further enhance gesture recognition robustness, refine control algorithms, and expand operational scenarios to include other delicate crops. The merger of cutting-edge sensing technologies with agricultural robotics heralds an era where the age-old labor of fruit picking is reimagined as a sophisticated, interactive collaboration between humans and machines.
This invention embodies a tangible leap in agricultural automation’s narrative—a movement from singularly autonomous systems toward cooperative robots that complement human intelligence. It signals a future where orchard labor is less burdensome and more efficient, aligning with global drives for smart farming that balance productivity with environmental and social sustainability.
Subject of Research: Not applicable
Article Title: Design and control algorithm of a motion sensing-based fruit harvesting robot
News Publication Date: 6-May-2025
Web References: 10.15302/J-FASE-2024588
Image Credits: Ziwen CHEN, Yuhang CHEN, Hui LI, Pei WANG
Keywords: Agriculture
Tags: advancements in agricultural roboticsautomated harvesting challenges and solutionshuman-machine division of labor in orchardshuman-robot collaboration in agricultureintuitive control systems for robotslabor-efficient fruit picking solutionsmotion-sensing technology in farmingorchard management innovationsprecision agriculture with roboticsreducing labor costs in fruit harvestingrobotic fruit harvesting technologysmart farming technologies for sustainable agriculture



{kind=link}