Credit: Tokyo Institute of Technology
Scientists at Tokyo Institute of Technology designed a new type of controller for the robotic arm used in robotic surgery. Their controller combines the two distinct types of gripping used in commercially available robotic systems to leverage the advantages of both, reducing the efforts of the surgeon and providing good precision.
Robotics has weaved its way into many different fields, and medicine is no exception; robot-assisted surgery has advanced dramatically over the past decade in almost every surgical subspecialty. Robot-assisted surgery is usually performed using surgical robot systems that involve a master-slave configuration, in which the “master” is a controller device that the surgeon manipulates to control a robotic arm. Such systems improve the dexterity and precision of surgeons by filtering out hand tremors and scaling their hand motions into smaller movements. They also reduce the risk of common surgical complications such as surgical site infection.
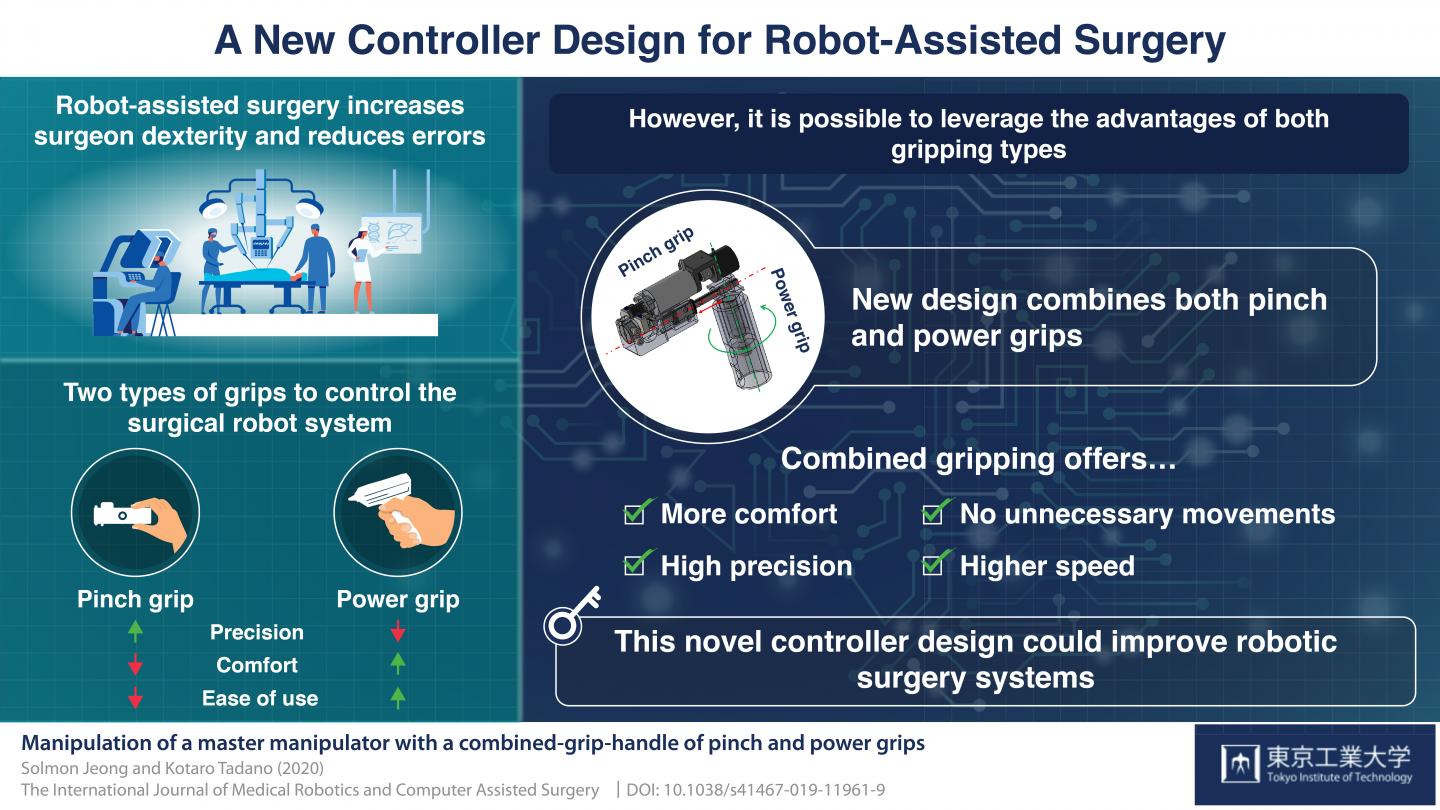
However, robot-assisted surgery comes with its own disadvantages, especially for the person performing the surgery. Robotic surgeons sometimes feel physical discomfort during surgery, with finger fatigue being common. This discomfort is associated with the way in which they grip the master controller. Two types of grips are usually used to control surgical robots: the “pinch grip” and “power grip.” The pinch grip has been used in conventional surgeries for centuries; it involves using the thumb, middle, and index fingers to achieve high-precision movements. On the other hand, the power grip involves grabbing a handle with the entire hand and is more suitable for forceful work and large movements.
Because the pinch grip puts tension on certain muscles of the hand and fingers, it is more likely to cause fatigue. And although the power grip does not seem to cause such discomfort, it offers less precise control. Therefore, there is a trade-off between the discomfort caused by the pinch grip and the lack of fine control of the power grip. Fortunately, Mr. Solmon Jeong and Dr. Kotaro Tadano, a pair of researchers from Tokyo Institute of Technology (Tokyo Tech), found a clever solution to this problem. In a study published in The International Journal of Medical Robotics and Computer Assisted Surgery , the researchers speculated that a master controller that combines both types of gripping can be designed. Dr. Tadano explains, “In robotic surgery, the limitations of the two conventional gripping methods are strongly related to the advantages and disadvantages of each gripping type. Thus, we wanted to investigate whether a combined gripping method can improve the manipulation performance during robotic surgery, as this can leverage the advantages of both gripping types while compensating for their disadvantages.”
After a proof-of-concept experiment that yielded promising results, the researchers designed a robotic surgery system with a modular master controller that could be adjusted to employ either pinch, power, or combined gripping. The system was tested through a pointing experiment, in which 15 participants had to control a robotic arm to bring the tip of a needle into target holes in the least amount of time without touching obstacles. Various conditions were tested for each gripping type, such as the use of arm and palm rests, use of handle, gripping type, and pinch grip motion. The findings showed that the combined grip yielded better performance in the pointing experiment on various fronts, including number of failures (touching an obstacle), time required, and overall length of the movements performed to reach the targets. Many participants also reported to prefer the combined gripping method over the other two, owing to the ease and comfort in using this method.
This new master controller design could be a step in the right direction in robot-assisted surgery. “The manipulating method of master controllers for robotic surgery has a significant influence in terms of intuitiveness, comfort, precision, and stability. In addition to enabling precise operation, a comfortable manipulating method could potentially benefit both the patient and the surgeon,” remarks Dr. Tadano. Although future work is needed to analyze other variables involved in robotic arm manipulation, this work surely paves the way for advanced surgical robot systems.
###
Kotaro Tadano – Precise control with surgical assist robots
Tokyo Tech Research “Surgical Assist Robots”
Media Contact
Emiko Kawaguchi
[email protected]
81-357-342-975
Related Journal Article
http://dx.



{kind=link}