A groundbreaking study published in the prestigious journal Engineering delves into the intricacies of deep learning technology, specifically tailored for the autonomous navigation of size-adaptable microswarms. Spearheaded by a talented team of researchers, including Lidong Yang and Li Zhang, the investigation presents a novel framework that addresses the formidable challenges of navigating microswarms in real-world, confined environments. As the field of micro and nanorobotics continues to evolve, this study marks a significant milestone, showcasing the potential of deep learning in enhancing the capabilities of these miniature robotic entities.
At the forefront of this research is the acute realization of the potential that micro and nanorobots have in revolutionizing biomedicine. The applicability of these robots extends to numerous fields, particularly in areas such as minimally invasive surgeries, targeted drug delivery, and therapeutic interventions. Previous endeavors in the realm of microrobotics have demonstrated successful targeted delivery mechanisms using drug-loaded biohybrid microrobots, underscoring their transformative potential. However, the functionality of these microswarms has often faced substantial hurdles, primarily related to achieving autonomous navigation that is both efficient and collision-free in the dynamically changing landscapes of confined spaces.
One critical challenge that researchers encounter in microswarm navigation is the inherent variability in size among microrobots. Traditional path-planning techniques frequently neglect to account for the physical dimensions of these robots, leading to inadequate solutions. Additionally, the reconfigurability of deformable microrobots poses another layer of complexity that existing algorithms fail to adequately address. Recognizing these issues, the research team devoted their efforts toward developing a cutting-edge deep learning-based scheme specifically designed to enhance navigation capabilities in microswarm deployments.
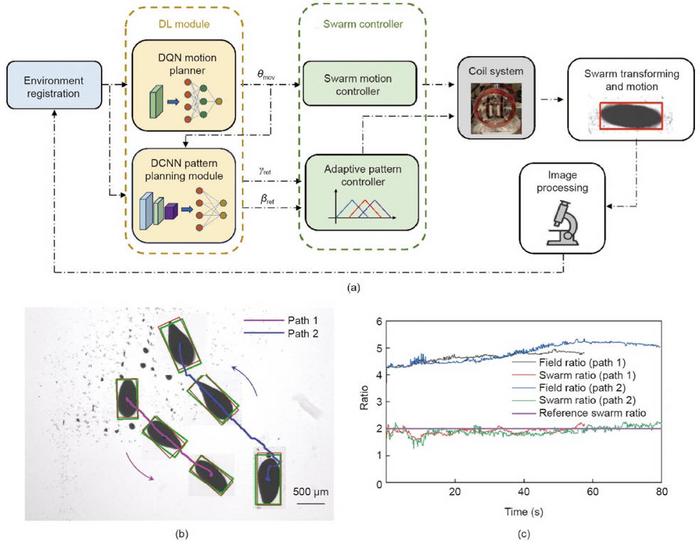
The nucleus of this innovative framework is a deep Q-network (DQN) that specializes in path planning. Utilizing reinforcement learning principles, this approach excels in real-time planning, making it particularly adept at handling complex scenarios characterized by channel-like structures and obstacles that may shift dynamically. Rigorous training on various sizes of microrobots, including configurations measuring 1×1, 2×2, 3×3, and 5×5 pixels, resulted in an impressive success rate exceeding 92% after completion of 30,000 training episodes. This efficacy not only proves the validity of the model but also showcases its capability to recommend adaptive safe distances to accommodate varying robot sizes, thus ensuring reliable navigation even in cluttered environments.
The research team further expanded upon their DQN-based approach by introducing a pattern-distribution planner focused on real-time swarm pattern planning and control. This planner employs an intelligently constructed cost function to pinpoint the optimal distribution of the swarm, facilitating seamless maneuvering amidst surrounding obstacles. Leveraging a deep convolutional neural network (DCNN), the researchers demonstrated the capability to generate optimal swarm patterns. In scenarios necessitating agility, such as navigating ribbon-like formations, the DCNN adeptly calculated suitable swarm distributions by factorizing in the presence of changes in the environment.
This comprehensive DL-based framework not only surpasses conventional planning methodologies in dynamic and variable situations but also exemplifies its remarkable adaptability to different microrobot sizes. What this indicates is that such navigation strategies could provide reliable, efficient solutions for a diverse array of microswarm applications, thus transforming the way we envision their deployment across medical, industrial, and agricultural fields.
The implications of this research extend far beyond mere academic exercise. Anticipating the needs of practical application, the study paves the way for a deeper understanding of how these microswarms might autonomously operate in more complex ecosystems, such as physiological surroundings or environments complicated by hydrodynamic disturbances. The findings hold the potential to crystallize new avenues for microswarm applications in biomedicine, offering enhanced therapeutic approaches and innovative surgical techniques that can mitigate risks associated with traditional methods.
To encapsulate the crux of the findings, the research titled “A Deep Learning-based Framework for Environment-adaptive Navigation of Size-adaptable Microswarms” serves as an important reference point for future exploration within the field. The work represents a convergence of artificial intelligence and robotics, showcasing how computational advancements can bridge the chasm between theoretical modeling and practical application. It stands to incite further inquiry into the autonomy of microswarms, with prospects that extend into interactive and responsive biomedicine.
In summary, the research published in Engineering underscores the incredible potential of deep learning technologies as tools for autonomous navigation in microswarms. As teams worldwide continue to explore the remarkable capabilities of microrobots, studies such as this will undoubtedly be vital. The proactive acquisition of new knowledge surrounding the robotics field will only serve to enhance our capabilities, ultimately paving the way for significant advancements that could redefine our approach to complex biological challenges.
With this framework, researchers and practitioners in the field are encouraged to think creatively about the possibilities that lie ahead. The integration of deep learning solutions into the practical domain of microswarm navigation heralds a new era of exploration and application that could enrich the field of microscale robotics and expand its implications across various industries.
The significance of this research cannot be understated. As we stand on the brink of technological advances in microrobotics and artificial intelligence, the work of this research team showcases the transformative possibilities available to us. The developments articulated within this paper will set the tone for subsequent investigations, ensuring that microswarms are not only a product of scientific imagination but a practical reality poised to make waves in numerous fields.
In conclusion, the collaboration and innovation showcased in this study illuminate the path forward for integrating deep learning into autonomous robotics. The potential benefits not only address existing limitations but also create new opportunities for research and development, paving the way for future enhancements in microswarm technologies.
Subject of Research: Environment-adaptive navigation of size-adaptable microswarms
Article Title: A Deep Learning-based Framework for Environment-adaptive Navigation of Size-adaptable Microswarms
News Publication Date: 2-Dec-2024
Web References: DOI Article
References:
Image Credits: Credit: Jialin Jiang et al.
Keywords
Navigation, Deep Learning, Microrobots, Microswarms, Path Planning, Biomedicine, Reinforcement Learning.
Tags: autonomous navigation technologychallenges in microroboticscollision-free navigation in roboticsconfined environments for microswarmsdeep learning applications in roboticsdeep learning in microswarm navigationmicro and nanorobotics advancementsminimally invasive surgical robotsrevolutionary biomedicine technologiessize-adaptable microrobotstargeted drug delivery systemstherapeutic interventions using microrobots



{kind=link}