Credit: Radim Tylecek / University of Edinburgh
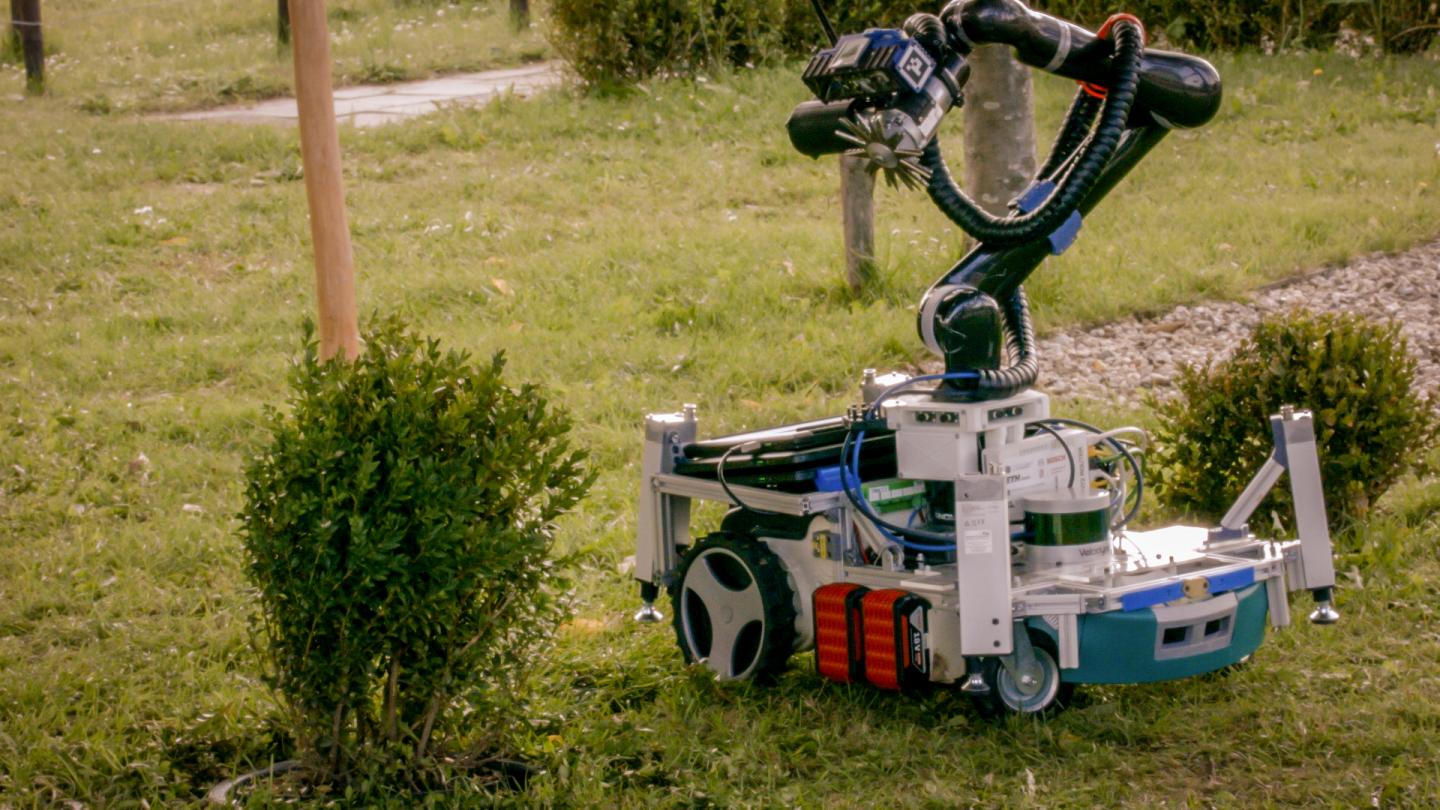
A gardening robot has been developed that can self-navigate and automatically prune roses and trim bushes.
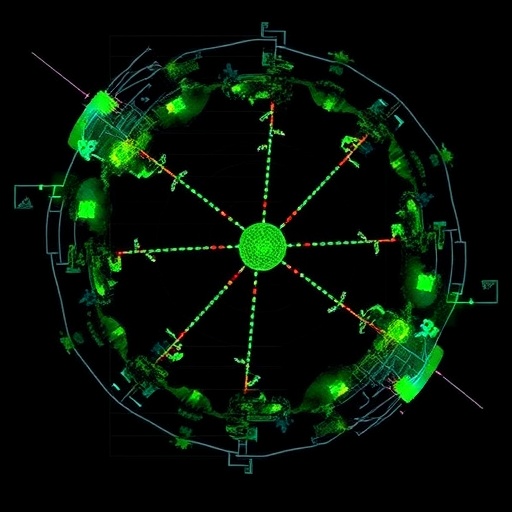
The green-fingered device – known as Trimbot – uses cameras and 3D mapping technology to find its way around gardens and perform precise tasks with cutting tools.
Prototype robots could be used to maintain communal green spaces, support farmers and help people with mobility issues tend their gardens, researchers say.
Scientists created Trimbot using the latest robotics technologies and 3D computer vision techniques. They fitted five pairs of cameras and a flexible robotic arm to an automated lawnmower made by electronics company Bosch.
The battery powered device is pre-programmed with a rough outline of a garden to aid navigation. Data captured by the robot’s 3D cameras enable it to perform specific tasks.
Researchers created algorithms that enable the robot to compare overgrown bushes with ideal final shapes as it trims. Using a different cutting tool, Trimbot can prune roses by pinpointing the exact part of each plant’s stem that should be cut.
Technologies developed during the project could be incorporated into Bosch’s range of automated lawnmowers, the team says.
The four-year project, coordinated by researchers from the University of Edinburgh, has been funded by the European Union’s Horizon 2020 programme. It also involves scientists from Wageningen University and Research, the Universities of Amsterdam, Groningen and Freiburg, ETH Zurich and Bosch.
Professor Bob Fisher, of the University of Edinburgh’s School of Informatics, who coordinated the project, said: “Getting the robot to work reliably in a real garden was a major feat of engineering. The eight partner teams developed new robotics and 3D computer vision technology to enable it to work outdoors in changing lighting and environmental conditions.”
###
Media Contact
Corin Campbell
[email protected]
44-131-650-6382


{kind=link}