A new publication from Opto-Electronic Advances; DOI 10.29026/oea.2023.210163 discusses how carnivorous plants inspire smart slippery surfaces and bionic robots.
Credit: OEA
A new publication from Opto-Electronic Advances; DOI 10.29026/oea.2023.210163 discusses how carnivorous plants inspire smart slippery surfaces and bionic robots.
Carnivorous plants have inspired innovations of advanced stimuli-responsive actuators and lubricant-infused slippery surfaces. However, hybrid bionic devices that combine carnivorous plants’ active and passive prey trapping capabilities remain challenging. The research team developed a moisture-responsive shape-morphing slippery surface. They integrated a lubricant-infused slippery surface with an LRGO/GO bilayer actuator. The team prepared a series of proof-of-concept actuators, including a smart frog tongue and a smart flower, demonstrating active/passive trapping, droplet manipulation, and sensing.
Carnivorous plants can trap and digest small insects through sophisticated actuating mechanisms or unique surface wettability. This ability has inspired the development of artificial smart surfaces/devices for engineering applications, such as anti-icing surfaces, anti-biofouling, droplet condensation, and droplet manipulation. Mimicking their trapping behaviors has led to innovative strategies for designing synthetic surfaces, actuators, and robots.
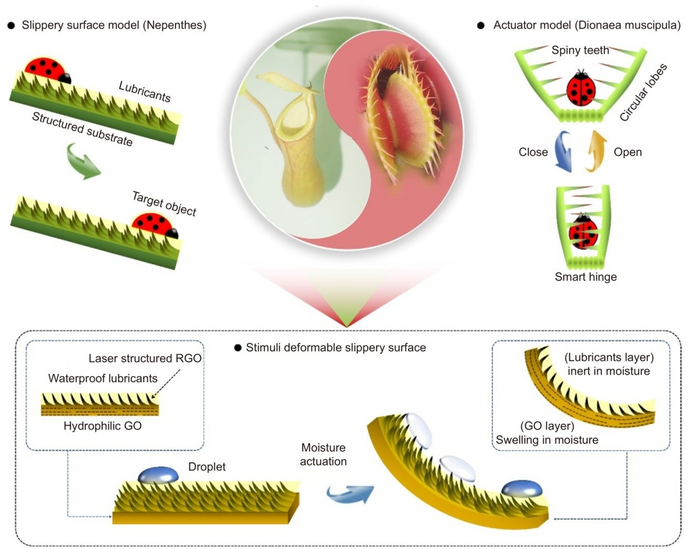
Generally, the trapping mechanism of carnivorous plants differs among different species, which can be classified into two categories: active trapping and passive trapping. However, hybrid bionic devices that combine the merits of the two distinct kinds of carnivorous plants, with both positive and passive trapping abilities, are still rare. The combination of Dionaea muscipula-inspired actuators with a slippery surface that mimics the Nepenthes pitcher plant isbeneficial to both actuator design and the development of a smart surface with superwettability. Nevertheless, it is challenging to reach this end.
Femtosecond laser direct writing (FsLDW) induced photoreduction and simultaneous structuring to prepare a GO and LRGO bilayer actuator that enables dynamic deformation under moisture actuation. After that, a lubricant-infused slippery surface was integrated with the graphene actuator by immobilizing lubricant at the LRGO side through the capillary forces.
The two types of carnivorous plants demonstrate distinct strategies for trapping prey. Nepenthes pitcher plants catch insects through a passive trapping mechanism with the help of lubricants-infused slippery surfaces. In contrast, Dionaea muscipula performs an active trapping behavior through a sophisticated actuating mechanism. The concept of the hybrid bionic model is the combination of the two tapping behaviors within one synthetic smart surface here, which the research team called a stimuli deformable slippery surface.
Traditional stimuli-responsive actuators enable reversible deformation under external stimuli. They reveal the great potential for developing trapping robots. However, in most cases, simple bending deformation cannot trap insects because of the slow response to environmental stimuli or the lack of surface wettability control. The team combined the moisture-responsive actuator with a lubricant-infused slippery surface together. The combined effect of actuation and slippery property endows the oil-infused LRGO/GO film with enhanced trapping ability.
The research team demonstrated a moisture-responsive shape-morphing slippery surface that can contact droplets actively and let them slide away passively. Based on this hybrid bionic concept, a smart frog tongue that can catch and manipulate droplets containing live tubificidaes is prepared. Notably, the slippery surface can bend under moisture actuation, get in touch with the droplet, and let it slide to the bottom, demonstrating both active catching and passive trapping capabilities.
In conclusion, the in-situ integration of the lubricant-infused slippery surface with the bilayer actuator does not degrade the actuating performance. It also improves its deformation degrees under moisture actuation. The presence of an oil layer can entirely prevent the transmission of water molecules through the LRGO side, and selective water adsorption only occurs within the GO layer. As a result, the oil-LRGO/GO actuator demonstrated large deformation curvature, short response/recovery time, and improved stability. For practical applications, laser interference ablation that uses an interference effect for periodical patterning is more effective. The significance of this work lies in the fabrication of a shape-morphing slippery surface with hybrid bionic functionalities of both stimuli-responsive deformation and oil-lubricated slippery properties.
The combination of shape-morphing ability with the slippery surface benefits both actuating performance and the usefulness of a smart surface with superwettability. It leads to new applications, such as droplet collection, manipulation, and rainfall sensing. Moisture-responsive actuators can directly harness energy from naturally occurring or engineered evaporation from water. That can subsequently be converted to mechanical energy or electricity, such as weather-responsive architectural systems, smart textiles, and soft robots. The cross-species bio-inspired materials benefit both actuator design and the development of smart surfaces with superwettability. The moisture-responsive shape-morphing slippery surface reveals great potential for developing bionic robots.
Article reference: Han DD, Zhang YL, Chen ZD, Li JC, Ma JN et al. Carnivorous plants inspired shape-morphing slippery surfaces. Opto-Electron Adv 6, 210163 (2023). doi: 10.29026/oea.2023.210163
Keywords: femtosecond laser fabrication / graphene oxide / moisture responsive actuators / slippery surface / bionic devices
# # # # # #
Opto-Electronic Advances (OEA) is a high-impact, open access, peer reviewed monthly SCI journal with an impact factor of 8.933 (Journal Citation Reports for IF2021). Since its launch in March 2018, OEA has been indexed in SCI, EI, DOAJ, Scopus, CA and ICI databases over the time and expanded its Editorial Board to 36 members from 17 countries and regions (average h-index 49).
The journal is published by The Institute of Optics and Electronics, Chinese Academy of Sciences, aiming at providing a platform for researchers, academicians, professionals, practitioners, and students to impart and share knowledge in the form of high quality empirical and theoretical research papers covering the topics of optics, photonics and optoelectronics.
# # # # # #
More information: http://www.oejournal.org/oea
Editorial Board: http://www.oejournal.org/oea/editorialboard/list
All issues available in the online archive (http://www.oejournal.org/oea/archive).
Submissions to OEA may be made using ScholarOne (https://mc03.manuscriptcentral.com/oea).
ISSN: 2096-4579
CN: 51-1781/TN
Contact Us: [email protected]
Twitter: @OptoElectronAdv (https://twitter.com/OptoElectronAdv?lang=en)
WeChat: OE_Journal
# # # # # #
DOI
10.29026/oea.2023.210163

