Bio-machine hybrid robots (BHRs) represent a new generation of micro-aerial vehicles that be controlled by building an interface between biological and artificial systems. In contrast to conventional bionic robots, they are free of complex mechanical structures, and due to the direct adoption of the animal body, they have superior moving characteristics and lower energy demand. Thus, the BHRs can be applied in many important scenarios, such as urban and wilderness rescue operations, environmental monitoring and hazardous area surveys.
Credit: Jieliang Zhao Beijing Institute of Technology
Bio-machine hybrid robots (BHRs) represent a new generation of micro-aerial vehicles that be controlled by building an interface between biological and artificial systems. In contrast to conventional bionic robots, they are free of complex mechanical structures, and due to the direct adoption of the animal body, they have superior moving characteristics and lower energy demand. Thus, the BHRs can be applied in many important scenarios, such as urban and wilderness rescue operations, environmental monitoring and hazardous area surveys.
To accomplish long mission endurance, the energy supply of the control backpack must be considered. As different biological carriers have different requirements for the energy equipment, BHRs’ power supply is an important issue. A review paper by scientists at the Beijing Institute of Technology summarized advancements in supply devices in BHRs research.
The new review paper, published on Sep. 26 in the journal Cyborg and Bionic Systems, provided a comprehensive overview of the various energy supply methods in BHRs research, from the selection of chemical batteries for different bio-carriers to the development and application of various energy harvesters.
“You may couldn’t imagine that one day when you are trapped in the wild, the first one to notice your distress message and rescue you is an animal. But this will be a reality in the future.” explained study author Jieliang Zhao, a professor at the Beijing Institute of Technology.
For a long time, bionic scientists have expected to be able to mimic the Creator’s ingenious biological designs and constructions. Although scientists have designed and built robots to mimic the movement of animals in nature in every way possible, no bionic robot has yet matched the efficiency and maneuverability of the animal body itself.
Bio-machine hybrid robots (BHRs) have become another new method. BHRs use animals as carriers and modulate carrier movement by constructing bio-mechanical interfaces to accomplish scenario-specific tasks. The energy supply unit used to power the control backpack and electronic component carried by BHRs determines their future development and practical application, according to Zhao.
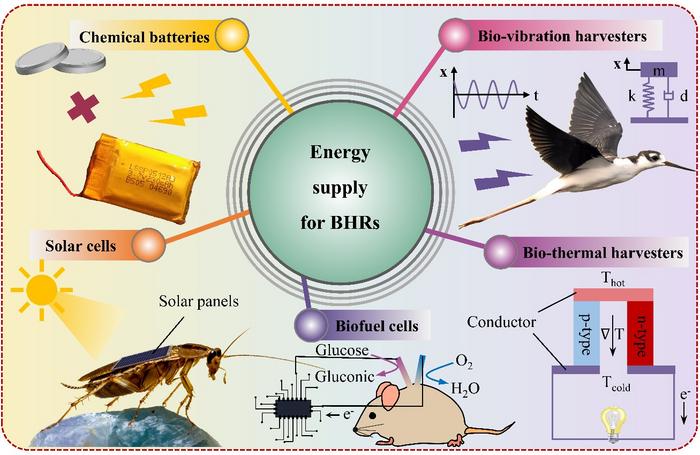
The newly published review analyzed the various energy supply methods in BHRs research. The study authors grouped the energy supply devices into five categories: chemical batteries; solar cells; biofuel cells; bio-thermal harvesters and bio-vibration harvesters. They analyzed the focus of different carrier animals in the selection of chemical batteries separately. For example, when selecting the battery for flying insects, in addition to meeting the basic electrical requirements, it is also necessary to consider the weight and size of the entire battery, to ensure the carrier insect can fly properly.
Although the size of the batteries becomes smaller and smaller, they can’t provide sustainable energy for BHRs and the frequent charging will affect animal life. Thus, some researchers started to develop solar cells, biofuel cells, bio-thermal harvesters and bio-vibration energy harvesters to supply energy to BHRs. In the review, they contain a summary overview of current research on self-powered devices for BHRs. “Energy harvesters can effectively harvest different forms of energy from the surrounding environment or the animal itself, which could achieve self-powering of the BHRs,” said Zhao.
Looking forward, the team considers that five important challenges need to be overcome. The first one is developing high energy density energy supply devices. They think with the creation of new materials and advances in micro-nano technology, the main directions for enhancing energy density are provided in terms of composite materials and micro-scale structural design.
The second one is developing biocompatibility of energy supply devices to avoid serious immune reactions that could affect the animal’s lifetime. The third one is compound energy supply. By reasonably harvesting multiple environmental energy sources and applying multiple energy conversion mechanisms, the space utilization efficiency of energy supply devices be improved effectively and the power output can be also increased.
The fourth one is the stability of the energy supply because the long-term stability of the energy supply system is a basic requirement for the effective control of BHRs. The last one is an environmentally friendly energy supply. As BHRs are used in the natural environment, addressing the impact of energy supply systems on the environment is a vital challenge.
“The research field of energy supply for BHRs is still in its infancy,” said Zhao. Most studies have been done only in the laboratory and the output of harvesters is lower than actual demand. As new conceptual robots, BHRs have important application prospects in future scenarios, such as animal monitoring and wildlife rescue. The energy supply system directly determines the practical application of BHRs. This review calls for more researchers to be able to focus on this field and work together to overcome the challenges in energy supply and promote the practical application of BHRs。
Authors of the paper include Zhiyun Ma, Jieliang Zhao, Li Yu, Mengdan Yan, Lulu Liang, Xiangbing Wu, Mengdi Xu, Wenzhong Wang, Shaoze Yan.
This work was supported by the National Key R&D Program of China (2021YFB3400200), the Beijing Natural Science Foundation (3212012), the National Natural Science Foundation of China (52075038), the Opening Project of the Key Laboratory of Bionic Engineering (Ministry of Education), Jilin University (KF20200001), and the Opening Project of State Key Laboratory of Tribology, Tsinghua University (SKLTKF20B06).
The paper, ” A Review of Energy Supply for Biomachine Hybrid Robots ” was published in the journal Cyborg and Bionic Systems on 26 September 2023 at DOI: https://doi.org/10.34133/cbsystems.0053
Reference
Authors: Zhiyun Ma1, Jieliang Zhao1*, Li Yu1, Mengdan Yan1, Lulu Liang1, Xiangbing Wu1, Mengdi Xu2, Wenzhong Wang1*, Shaoze Yan3
Title of original paper: A Review of Energy Supply for Biomachine Hybrid Robots
Journal: Cyborg and Bionic Systems
DOI: 10.34133/cbsystems.0053
Affiliations:
1School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, P. R. China.
2Department of Mechanical Engineering, Carnegie Mellon University, Pittsburgh, PA 15213, USA.
3Department of Mechanical Engineering, Tsinghua University, Beijing 100084, P. R. China.
A brief introduction about yourself.
About Dr. Jieliang Zhao:
Jieliang Zhao is a Professor at the Beijing Institute of Technology (BIT) and Teli Young Fellow of BIT. His research interests include Spacecraft dynamics, animal behavior and bionic machinery, and intelligent structures and drives. Up to now, he has published over 35 SCI papers in ACS Applied Materials and Interfaces, Applied Surface Science, Acta Astronautica, Journal of Bionic Engineering, Journal of Insect Science, and other journals with the h-index of 9 and total citations of over 261.
Personal Homepage: https://me.bit.edu.cn/szdw/jsml/jdkxjcb/jxsjjys/bssds18/011124976e4b4967affa67c6f99e2e19.htm
DOI
10.34133/cbsystems.0053
Article Title
A Review of Energy Supply for Biomachine Hybrid Robots
Article Publication Date
26-Sep-2023

