The project PROBOSCIS has been funded by the European Commission with 3.5 million euros and it is coordinated by IIT-Istituto Italiano di Tecnologia; the project represents a completely new approach in the field of bioinspired robotics
Credit: IIT-Istituto Italiano di Tecnologia
Elephants interact with the surrounding world using their proboscis, an organ with exceptional agility and versatility that enables them to perform both strong and delicate tasks by grabbing different objects, as well as to breath, eat, drink and communicate with their own kind. It is a highly sensitive organ, and it combines in a single body the touch sense and the strength of more than a hundred thousand muscles, without bones. Starting from the study of these features, the EU-funded project PROBOSCIS will develop a new generation of bioinspired robot manipulators, capable to engage with uncertain environments, promptly adapt to unexpected situations and perform a multitude of real-world grasping tasks. This new robot manipulator will represent a game changer in manufacturing and food industry, and in assistive robotic systems for elderly and disabled people.
The PROBOSCIS project has been funded with about 3.5 million euros by the European Commission within the Horizon 2020 FET-Future Emerging Technologies programme. The project is coordinated by Lucia Beccai, senior researcher at IIT-Istituto Italiano di Tecnologia in Pontedera (Pisa, Italy), and it involves the University of Geneva (Switzerland), the Hebrew University of Jerusalem (Israel), Scuola Superiore Sant’Anna in Pisa (Italy) and Photocentric Ltd. in Peterborough, Cambridgeshire (UK).
The project consortium will provide multidisciplinary expertise with the common goal of defining a new and universal concept of robotic manipulation, where robots with no distinction between a soft arm and a gripper will be capable to reach, sense, grasp, manipulate and release in the environment a wide range of payloads, and objects of diverse dimensions and shapes, while operating in dry and wet environments.
From a biological point of view PROBOSCIS will study the trunk of the African bush elephant (Loxodonta africana) species. Innovative hi-resolution episcopic microscopy techniques will be used to investigate the anatomy of a proboscis exemplar kept at the University of Geneva, and its structure will be rebuilt in detail through 3D visualization tools. Moreover, African bush elephants will be observed in their natural habitat and their trunk movements investigated by collaborating with various research centres in South Africa.
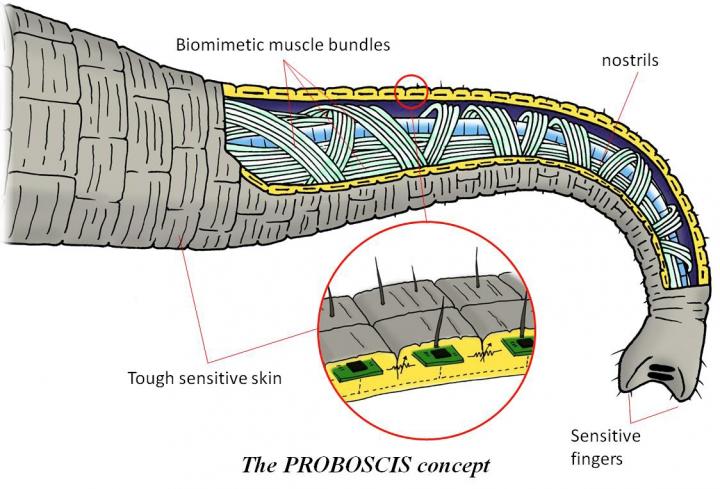
These studies represent a completely new approach in the field of bioinspired robotics. For instance, one of the peculiarities of the African bush elephants’ trunk is that it terminates with two extremities or “fingers” used by the animal to manipulate small and delicate objects with great precision. The trunk movements will be recorded during the manipulation of objects with pre-defined features (like shape, weight, dimensions) and engineering specifications will be extracted to build the artificial system.
The new robotic manipulator will have a body made by soft actuators with variable stiffness, sensitive to their own movements, and organised in a bioinspired architecture together with an advanced soft tactile sensing system able to provide the necessary information to the control algorithms. Soft tactile sensing will be fundamental for enabling the overall system intelligence. In fact, unlike many robots, based on vision for control and interaction with the environment, PROBOSCIS will be mainly guided by touch. In particular, the artificial trunk will be covered by an artificial skin with a mechanical structure inspired from the wrinkled elephant skin, sensitive yet resistant to hostile environments, like high temperatures and dust, and the tip will be densely sensorized in order to guarantee a fine interaction with small and delicate objects.
PROBOSCIS research activity will be based on a strong synergy and collaboration between engineers, biologists and material scientists.
In IIT, two groups are involved, the ‘Artificial Touch in Soft Biorobotics’ team led by Lucia Beccai, and the ‘Bioinspired Soft Robotics’ team led by Barbara Mazzolai (Director of the IIT Centre for Micro-Bio-Robotics). Researchers will address the bioinspired design and development of the soft robotic system itself. In Italy, the Biorobotics Institute of Scuola Superiore Sant’Anna is also involved with the group of Cecilia Laschi and Egidio Falotico, who will develop the control algorithms of the robot.
The team coordinated by Michel Milinkovitch at the University of Geneva, Switzerland, will study the trunk anatomy and record its movements in its natural habitat. From these results, an artificial kinematic model will be developed in collaboration with Scuola Superiore Sant’Anna and IIT. The teams above will develop and implement specific experimental protocols with animals in Africa to investigate the proboscis capabilities useful to develop the soft robotic system.
At the University of Jerusalem in Israel, the team coordinated by Shlomo Magdassi will focus on the development of innovative materials that will enable a strong integration of sensing and actuation capabilities by composite bioinspired structures, such that they can be produced by 3D printing methods. The collaboration with the group of Sara Karmel from Photocentric Ltd. in UK will be significant in order to innovate the commercial 3D printing methods by using the new materials in prototypes of different dimensions.
In future, PROBOSCIS technology will tackle several applications from autonomous assembly lines, personal robot helpers, sorting robots in food production, and search & rescue operations. For example, new generations of manipulators could be developed: in the manufacturing industry, capable of adapting real time to objects of different shapes and dimensions production lines with occluded vision; in the food industry, capable to grab and choose fruits and vegetables; in healthcare, capable to lift an elderly or disabled person, but also to hand over a fork or a fresh fruit; in search and rescue, capable of moving heavy rubble and detecting possible victims without vision.
Finally, these researches will contribute to the scientific understanding of elephants and to raise awareness on the conservation of the species.
###
Media Contact
Valeria delle Cave
[email protected]
0039-010-2896



{kind=link}