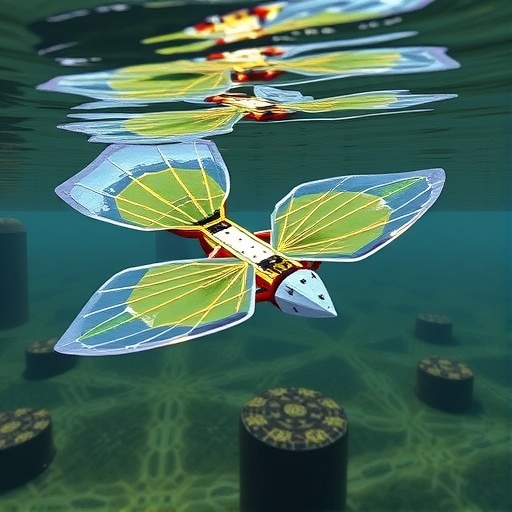
In a groundbreaking fusion of biology and robotics, a team of researchers has unveiled a revolutionary soft robotic wing that mimics the innate adaptive responses of marine and avian creatures to underwater disturbances. This innovation, spearheaded by scientists at the University of Southampton and collaborators from Edinburgh and Delft, Netherlands, represents a pivotal leap forward in underwater vehicle technology, addressing the persistent challenges posed by turbulent aquatic environments that traditional rigid-wing designs struggle to navigate efficiently.
The inspiration for this novel robotic wing arises directly from nature’s own design philosophy where birds and fish instinctively adjust their wing and fin shapes to counteract environmental fluctuations. Unlike the inflexible appendages currently employed by autonomous underwater vehicles (AUVs), this soft wing leverages a sophisticated proprioceptive feedback system that allows it to detect changes in water flow and modify its configuration in real-time, effectively achieving remarkable stability and energy efficiency.
Central to this advancement is the integration of an innovative electronic skin, or e-skin, developed by the interdisciplinary research team. This e-skin incorporates flexible liquid metal wires encapsulated within durable silicone layers, which function akin to biological nerves by sensing subtle deformations as the wing bends. These deformation signals are instantly processed, triggering hydraulic actuation within the wing’s internal chambers to dynamically adjust stiffness and camber, mirroring the autonomous adaptability seen in living organisms.
In quantitative tests, this bioinspired wing demonstrated an extraordinary capacity to mitigate sudden uplift impulses generated by underwater currents, reducing these destabilizing jolts by an impressive 87% compared to conventional rigid-wing counterparts. Not only did the adaptive soft wing outperform its traditional peers in stability metrics, but it also showcased response times up to four times faster than previous soft wing designs that lack proprioceptive sensing capabilities.
Moreover, the system’s energy demands are significantly lower than existing thermally actuated shape-changing mechanisms, consuming roughly five times less power. This efficiency is paramount for AUVs, as energy conservation directly enhances operational lifespan and range, key constraints in deep-sea and extended underwater missions. The soft robotic wing’s ability to maintain balance with minimal energetic cost opens new avenues for more autonomous, resilient underwater platforms.
The design ethos behind this technology challenges the longstanding paradigm of constructing more robust, mechanically rigid underwater robots to withstand ocean forces. Instead, the researchers advocate for developing smart, flexible systems that harmonize with their fluid environments, actively leveraging environmental dynamics instead of resisting them. Such biomimetic approaches promise to revolutionize robotic mobility and control within complex, unpredictable aquatic terrains.
Testing involved subjecting the wing to a broad spectrum of flow disturbances, both in shape and magnitude, comparing performance against a standard rigid wing and a basic soft wing devoid of proprioceptive feedback. The results highlighted not only superior disturbance rejection in the integrated proprioceptive wing but also demonstrated stabilization capabilities surpassing those measured in natural flyers such as barn owls during glide — a testament to the system’s refined control mechanisms.
Beyond the laboratory, the team acknowledges inherent challenges in scaling this technology for real-world underwater applications. Integrating the flexible wing with the usually rigid AUV structure and ensuring its durability amidst the harsh, variable marine environment remain critical hurdles. Nonetheless, they are optimistic that advancing actuator technologies with greater power output could further enhance the adaptive capacity and disturbance rejection of these hybrid passive-active systems.
This synergistic approach combining soft robotics, bioinspired sensing, and hydraulic actuation marks a transformative paradigm in underwater robotics research. It paves the way for next-generation AUVs capable of agile maneuvering, reduced energy consumption, and superior resilience against environmental unpredictability — qualities imperative for science, exploration, and surveillance missions in increasingly demanding aquatic contexts.
The research, published in npj Robotics, not only charts a promising path for aquatic soft wing development but also broadens the horizons of how robotic systems can harness proprioceptive feedback to merge biological nuance with cutting-edge engineering. As these systems evolve, the interplay between passive mechanical properties and active electronic sensing control promises to usher in a new era of robotics designed to truly coexist with the natural forces they face.
Professor Blair Thornton of the University of Southampton emphasized the significance of this advancement, remarking that underwater robots must possess continuous environmental awareness to operate reliably in dynamic ocean ecosystems. The integration of sensing with flexible materials is a critical step toward achieving truly adaptive systems that can meet the unpredictable demands of natural underwater habitats with finesse and efficiency.
Leo Micklem, lead author on the study, described the conceptual shift away from toughness in robotics toward intelligence and flexibility, highlighting that smart soft machines capable of symbiotic interaction with their environments embody the future of marine robotic design. Through blending biology’s principles of proprioception with engineering innovation, this research unlocks powerful pathways toward robotic systems that are not merely tools but responsive entities optimized for life beneath the waves.
Subject of Research: Not applicable
Article Title: Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection
News Publication Date: 12-Feb-2026
References:
Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection, npj Robotics, DOI: 10.1038/s44182-026-00078-z
Image Credits: University of Southampton
Keywords
Bioinspired robotics, Robotics, Robotic designs, Soft robotics
Tags: adaptive underwater roboticsautonomous underwater vehicles innovationbioinspired marine roboticselectronic skin for roboticsenergy-efficient underwater vehiclesflexible liquid metal sensorshydraulic actuation in roboticsinterdisciplinary robotics researchnature-inspired robotic wingproprioceptive feedback systemssoft robotic wing designunderwater stability technology


{kind=link}