In the realm of technology, the convergence of human sensory experiences and digital interaction continues to evolve, significantly impacting fields such as virtual reality, augmented reality, and assistive technologies for individuals with disabilities. The strides made in tactile feedback systems exemplify this evolution, as researchers explore ways to enhance user interaction through innovative approaches. A central focus of recent advancements in this field has been the development of devices that effectively provide users with tactile sensations in a safe, versatile, and enjoyable manner. At the forefront of such innovations is a new flexible electret tactile feedback actuator devised by a research team from Tsinghua University, led by Qian Xiang.
Traditional systems of tactile feedback have typically relied on two primary mechanisms: electrical stimulation and mechanical vibration. While electrical stimulation effectively transmits tactile signals by directly engaging nerves, it is burdened by various concerns, including inconsistent user experiences, skin discomfort, and transient sensory desensitization. Alternatively, mechanical vibration has emerged as a more user-friendly method, relying on flexible mechanical actuators which convey tactile sensations by inducing skin deformation. However, these systems usually require high-voltage power supplies due to their reliance on flexible functional materials, which presents both safety concerns and limitations in editing multi-dimensional tactile feedback information. The rise of low-voltage tactile feedback devices with enhanced programmability is considered essential for facilitating complex emotional interactions and dynamic command transmissions.
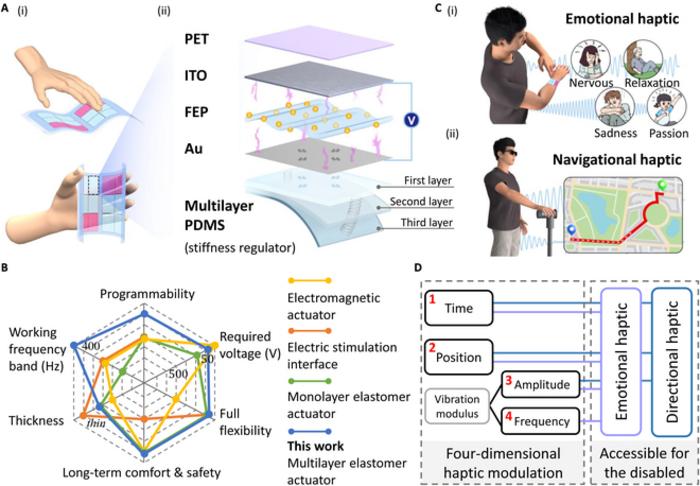
The innovative flexible electret actuator represents a significant leap forward in this endeavor, consisting of a carefully structured five-layer sandwich design utilizing multi-layer variable stiffness polydimethylsiloxane (PDMS) elastomers. The layers of this adaptive actuator include a polyethylene terephthalate (PET) encapsulation layer, an indium tin oxide (ITO) upper electrode layer, a fluorinated ethylene propylene (FEP) electret film layer, a gold electrode layer, and a PDMS stiffness regulator layer. This configuration allows for both low-voltage operation and versatile response to user inputs, enabling a wider range of tactile feedback that is programmable and adaptable to various applications.
.adsslot_9KBo5sxcgz{ width:728px !important; height:90px !important; }
@media (max-width:1199px) { .adsslot_9KBo5sxcgz{ width:468px !important; height:60px !important; } }
@media (max-width:767px) { .adsslot_9KBo5sxcgz{ width:320px !important; height:50px !important; } }
ADVERTISEMENT
In previous studies conducted by the research group, significant advancements were made in producing mechanical vibrations that effectively encode tactile information by manipulating the parameters of single-layer PDMS support systems. Building on this work, the research team integrated the concept of variable stiffness composites into their new actuator design, selectively modifying the crosslinking density of the multi-layer PDMS elastomers to optimize the output characteristics of the device.
Experimental results from this research paint an exciting picture: the actuator is capable of operating at ultra-low drive voltages while delivering substantial tactile feedback forces. Specifically, it can generate perceptible feedback at voltages as low as 5V, demonstrating a remarkable gain close to 1 mN/V at both 35V and 200V drive voltages. Furthermore, the actuator showcases a wide frequency response, effectively covering essential touch-sensitive ranges between 50 Hz and 450 Hz, thus optimizing its performance in conveying nuanced tactile sensations to users.
An extended aspect of the research involved developing a six-point actuator array system featuring an unprecedented four-dimensional tactile programming capability. This system incorporates dimensions such as time, position, amplitude, and frequency, allowing it to produce a highly tailored tactile experience that can vary from simple feedback signals to complex emotional interactions. The specific programming modes designed offer a structure for encoding emotional information through rhythmic parameters of tactile feedback, such as frequency modulation, vibration duration, and pauses, all of which directly relate to the emotional intensity of the interactions.
Moreover, through careful modulation of vibration amplitude and timing within the actuator array, researchers successfully induced an illusory sensation of flow in users. By regulating key parameters such as actuation flow direction, actuation onset time, overlapping vibration time, and amplitude, the research effectively defined multiple motion directions for the user experience. This innovative capability not only enhances the user’s tactile experience but also serves to bridge the gap between tactile sensations and emotional responses.
The experimental evaluation of the actuator array yielded promising results. Without prior training, users displayed an impressive average accuracy of 64.6% in recognizing emotional interactions, climbing to a notable 95.8% after undergoing a structured learning phase. In applications targeting navigation, the system achieved a remarkable accuracy rate of 94.2% for direction commands, underscoring its practical utility and efficacy in enhancing user interaction and experience.
The potential for future advancements in tactile feedback technology remains vast. Continued improvements in the resolution of emotional coordinate outputs will allow for increasingly intricate and subtle haptic simulations, pushing the boundaries of user experience further. Additionally, in striving to address real-world challenges, particularly for visually impaired individuals, the researchers are pursuing collaborative opportunities with organizations championing the needs of the blind community. Plans for extensive user studies to evaluate practical applications are underway, paving the way to more inclusive user experiences.
Looking ahead, the multi-stiffness soft elastomer materials explored in this study present an avenue for innovative applications in sensor and actuator structures across diverse industries. When synergistically integrated with hydrogel electronic skin technologies, this research harbors the potential for the development of customizable pixelated interfaces tailored for emotional management in wearable devices. The interdisciplinary collaboration with experts in neuroscience and psychology opens up exciting opportunities to expand the application scope of these technologies, laying the groundwork for innovative solutions in areas such as depression treatment, personalized rehabilitation, and educational tools.
Thus, the evolution of tactile feedback technologies is well-positioned to make significant contributions toward fostering a more inclusive and barrier-free society. With ongoing advancements promising to enhance user interaction and cognition, this research exemplifies the remarkable potential at the intersection of technology and human experience.
Subject of Research: Haptic feedback interface for emotional and directional interaction
Article Title: Emotional and Directional Enabled Programmable Flexible Haptic Interface for Enhanced Cognition in Disabled Community
News Publication Date: 3-Jun-2025
Web References:
References:
Image Credits: Copyright © 2025 Yuhan Liu et al.
Keywords
Tactile feedback, flexible actuators, emotional interaction, assistive technology, haptic interface, PDMS elastomers, low-voltage actuation, sensory experience.
Tags: advancements in assistive technologyassistive devices for disabled individualsaugmented reality interactioncognitive enhancement for disabilitieselectrical stimulation vs mechanical vibrationflexible electret tactile actuatorinnovative feedback mechanismsprogrammable haptic interfacesafe haptic feedback systemstactile feedback technologyuser-friendly tactile sensationsvirtual reality and haptics


{kind=link}