The rapid advancement of robotics and assistive technologies has ushered in a new era of possibilities for individuals with mobility challenges. A recent study from Peking University has introduced a revolutionary control framework for hip exoskeletons that grounds its capabilities in environmental perception. This innovative approach merges sensory data from the environment with human kinematic information, significantly optimizing the way exoskeletons respond during movement, particularly across varied terrains. By enhancing the accuracy and reducing the time required for transition detection, this system stands to offer a smoother, more intuitive experience for users of these assistive devices.
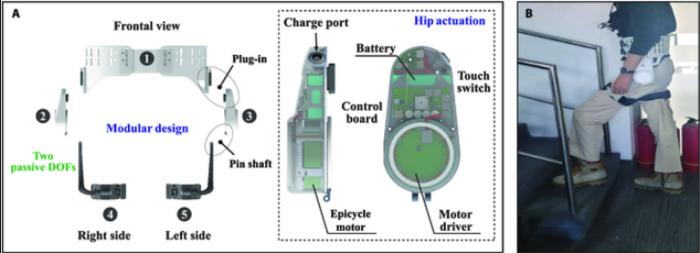
The heart of this innovation rests in its sophisticated control framework, which is layered into three essential components. The framework integrates a depth camera for real-time mapping of the environment, allowing for immediate adjustments in response to changes in terrain. This component is pivotal for ensuring that the exoskeleton can effectively assist users as they navigate obstacles. Complementing this is the use of pressure insoles that detect gait phases, enabling the system to understand the user’s movements and adjust its support accordingly. Finally, the low-level strategy employs physics-driven torque and damping adjustments tailored to the individual’s biomechanical profile. This meticulous design allows for a seamless transition between various locomotion modes.
One of the primary challenges confronting hip exoskeleton technologies has been the difficulty in achieving uninterrupted movement transitions, especially in varying environments such as stairs or uneven ground. The study’s authors address this challenge by employing a predictive approach that anticipates changes in terrain before they occur. By assessing the environment in real-time and activating appropriate adjustments in control modes, the system ensures that users experience fluid transitions from one walking condition to another. This predictive capability is made possible through the integration of depth-enhanced visual-inertial odometry technology with terrain reconstruction techniques, representing a novel method in the field.
Experimentation conducted as part of the research involved seven subjects who were asked to perform continuous locomotion tasks that included level-ground walking, stair ascent and descent, and various transitions between these states. The results were striking, as the framework achieved a high perception accuracy of over 95% for steady walking modes, with percentages reaching as high as 98.1% for level-ground walking. Furthermore, the system exhibited remarkable accuracy rates—between 87.5% and 100%—for detecting transitions, identifying these changes well ahead of transition completions, thereby improving performance and user satisfaction.
The research team’s findings emphasize the significant advantages of their framework when compared to conventional methods, particularly those reliant on convolutional neural networks (CNNs). Transition accuracy was enhanced by an impressive 20-30%, underlining the efficacy of their approach. Moreover, the reduced requirement for user-specific calibration adds an additional layer of convenience, particularly for individuals who may not have access to specialized adjustments. The implications of this research extend beyond convenience; relieving the burden of personalization could enable broader adoption and utility of exoskeleton technologies in everyday life.
The research initiative is articulated by a team comprising significant contributors such as Zhaoyang Wang, Dongfang Xu, Shunyi Zhao, Zehuan Yu, Yan Huang, Lecheng Ruan, Zhihao Zhou, and the senior author Qining Wang. Collectively, their work is a reflection of the cutting-edge research happening at Peking University and is supported by notable funding from the National Natural Science Foundation of China and projects spearheaded by the Beijing Municipal Science and Technology Committee. This backing not only underscores the societal importance of this research but also highlights China’s commitment to advancing scientific discovery and innovation.
The newly proposed framework not only demonstrates a breakthrough in technology but stands as a testament to the innovative resilience of researchers working toward enhancing human potential through technology. As we usher in this exciting new phase in rehabilitation and assistive technologies, the promise of these developments will hopefully translate into tangible benefits for the millions of individuals who would benefit from enhanced mobility and independence.
Subject of Research: Control Framework for Hip Exoskeletons
Article Title: Level-Ground and Stair Adaptation for Hip Exoskeletons Based on Continuous Locomotion Mode Perception
News Publication Date: April 22, 2025
Web References: Not available
References: Not available
Image Credits: Qining Wang, department of Advanced Manufacturing and Robotics, College of Engineering, Peking University
Keywords
Applied sciences and engineering, Health and medicine, Life sciences.
Tags: adaptive control systems for exoskeletonsadvancements in mobility assistance technologiesassistive robotics innovationscontinuous locomotion mode awarenessdiverse user generalization in roboticsenvironmental perception in roboticship exoskeletons technologylearning-free perception technologylevel ground and stairs navigationmobility challenges solutionsoptimizing movement in assistive devicesuser experience in exoskeletons


{kind=link}