New type of control system may broaden robots’ range of tasks and allow safer interactions with people
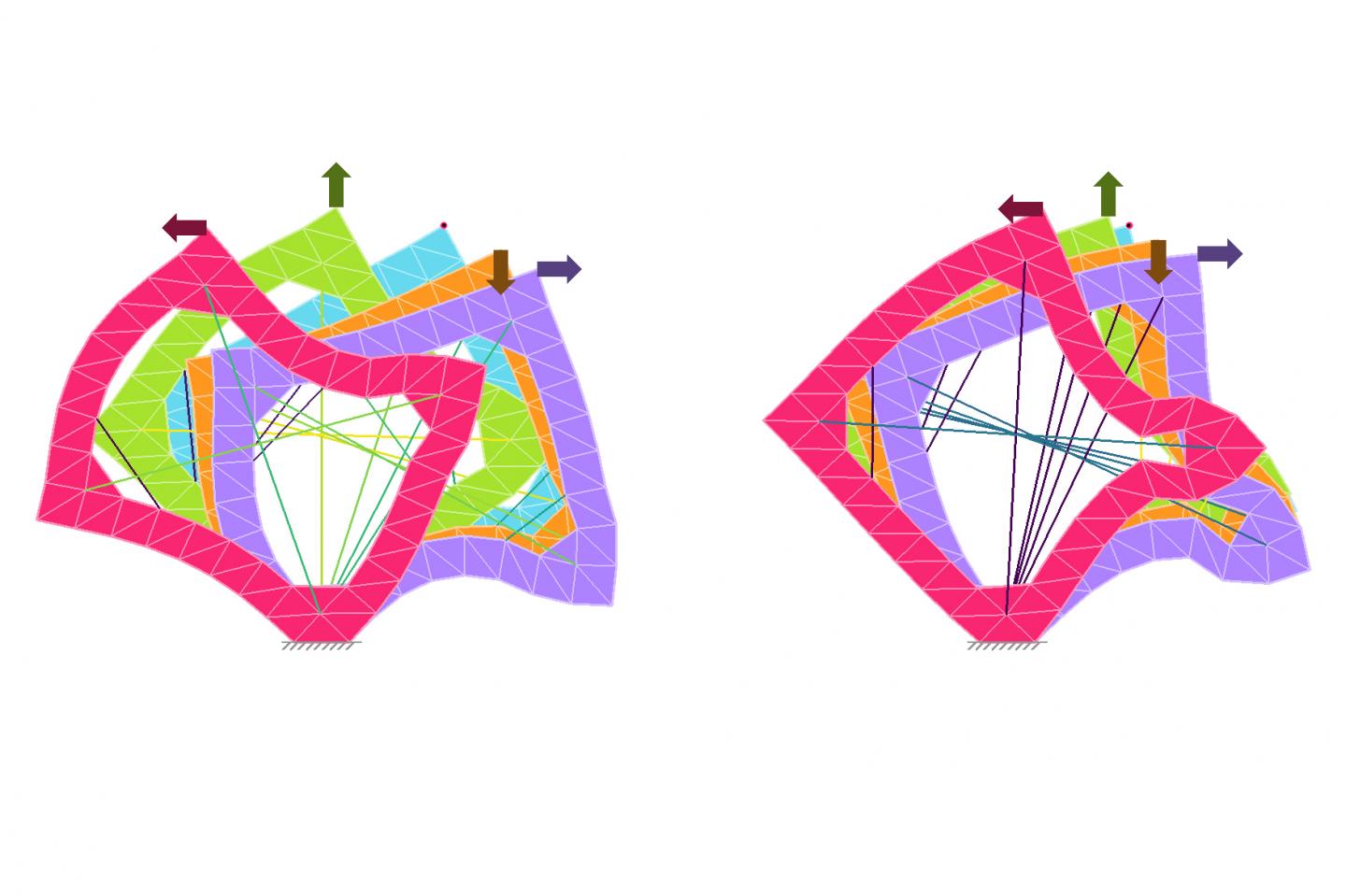
Credit: Courtesy of James Bern and Daniela Rus
Imagine a robot.
Perhaps you’ve just conjured a machine with a rigid, metallic exterior. While robots armored with hard exoskeletons are common, they’re not always ideal. Soft-bodied robots, inspired by fish or other squishy creatures, might better adapt to changing environments and work more safely with people.
Roboticists generally have to decide whether to design a hard- or soft-bodied robot for a particular task. But that tradeoff may no longer be necessary.
Working with computer simulations, MIT researchers have developed a concept for a soft-bodied robot that can turn rigid on demand. The approach could enable a new generation of robots that combine the strength and precision of rigid robots with the fluidity and safety of soft ones.
“This is the first step in trying to see if we can get the best of both worlds,” says James Bern, the paper’s lead author and a postdoc in MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL).
Bern will present the research at the IEEE International Conference on Soft Robotics next month. Bern’s advisor, Daniela Rus, who is the CSAIL director and the Andrew and Erna Viterbi Professor of Electrical Engineering and Computer Science, is the paper’s other author.
Roboticists have experimented with myriad mechanisms to operate soft robots, including inflating balloon-like chambers in a robot’s arm or grabbing objects with vacuum-sealed coffee grounds. However, a key unsolved challenge for soft robotics is control — how to drive the robot’s actuators in order to achieve a given goal.
Until recently, most soft robots were controlled manually, but in 2017 Bern and his colleagues proposed that an algorithm could take the reigns. Using a simulation to help control a cable-driven soft robot, they picked a target position for the robot and had a computer figure out how much to pull on each of the cables in order to get there. A similar sequence happens in our bodies each time we reach for something: A target position for our hand is translated into contractions of the muscles in our arm.
Now, Bern and his colleagues are using similar techniques to ask a question that goes beyond the robot’s movement: “If I pull the cables in just the right way, can I get the robot to act stiff?” Bern says he can — at least in a computer simulation — thanks to inspiration from the human arm. While contracting the biceps alone can bend your elbow to a certain degree, contracting the biceps and triceps simultaneously can lock your arm rigidly in that position. Put simply, “you can get stiffness by pulling on both sides of something,” says Bern. So, he applied the same principle to his robots.
The researchers’ paper lays out a way to simultaneously control the position and stiffness of a cable-driven soft robot. The method takes advantage of the robots’ multiple cables — using some to twist and turn the body, while using others to counterbalance each other to tweak the robot’s rigidity. Bern emphasizes that the advance isn’t a revolution in mechanical engineering, but rather a new twist on controlling cable-driven soft robots.
“This is an intuitive way of expanding how you can control a soft robot,” he says. “It’s just encoding that idea [of on-demand rigidity] into something a computer can work with.” Bern hopes his roadmap will one day allow users to control a robot’s rigidity as easily as its motion.
On the computer, Bern used his roadmap to simulate movement and rigidity adjustment in robots of various shapes. He tested how well the robots, when stiffened, could resist displacement when pushed. Generally, the robots remained rigid as intended, though they were not equally resistant from all angles.
Bern is building a prototype robot to test out his rigidity-on-demand control system. But he hopes to one day take the technology out of the lab. “Interacting with humans is definitely a vision for soft robotics,” he says. Bern points to potential applications in caring for human patients, where a robot’s softness could enhance safety, while its ability to become rigid could allow for lifting when necessary.
“The core message is to make it easy to control robots’ stiffness,” says Bern. “Let’s start making soft robots that are safe but can also act rigid on demand, and expand the spectrum of tasks robots can perform.”
###
Written by Daniel Ackerman, MIT News Office
Media Contact
Abby Abazorius
[email protected]
Original Source
https:/

{kind=link}