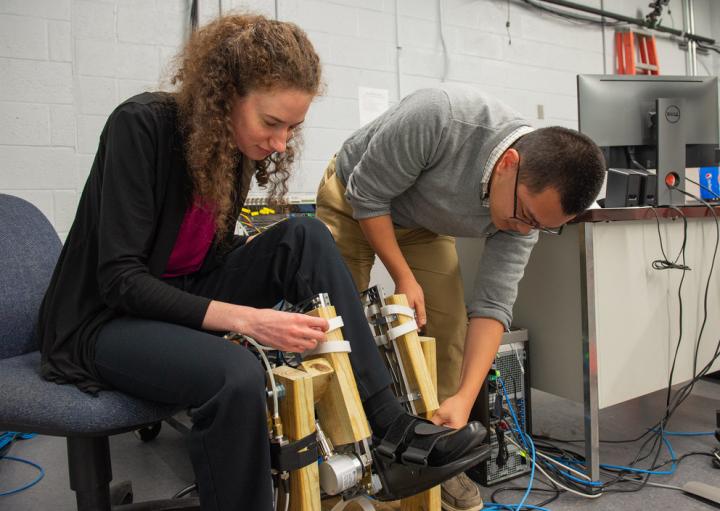
Credit: Tyler Henderson
To understand, model and optimize the comfort of lower limb robotic exoskeletons, researchers in the Penn State Department of Mechanical Engineering have been awarded a $700,000 grant from the National Science Foundation.
Robotic exoskeletons are wearable devices that help enable movement in people with physical disabilities. They can also assist with strenuous tasks beyond normal human capabilities. For this project, the researchers are focused on lower limb exoskeletons — assistive walking devices worn on the leg — to help patients recovering from a stroke and spinal cord injuries or those with cerebral palsy.
“In the field of exoskeletons, everyone acknowledges that comfort is important, but no one measures it, partly because there is no good way to do so,” said Anne Martin, assistant professor of mechanical engineering.
This collaborative project will address those concerns by measuring the physiological signals a person naturally transmits and mapping those values with user-reported feelings of comfort. With that knowledge in hand, the researchers will then aim to develop machine learning techniques to teach the exoskeleton how to adjust its own controls to be more comfortable.
Ultimately, the researchers aim to create a deeper interaction between a person and the robotic device they are wearing. As the human begins walking and adapting their own gait to the machine, the machine learning embedded within the robotics will adjust itself for optimal user comfort.
“This will be co-learning — the mutual adaptation of the machine and the mind,” said Bo Cheng, assistant professor of mechanical engineering.
The grant comes from a newly introduced program within the NSF called the Mind, Machine and Motor Nexus (M3X), which was created to support fundamental research at the intersection of humans, machines and motorized components.
This project draws together two unique specialties within the department. Martin brings her expertise in human walking and movement for the development of assistive devices and Cheng’s contributions will center on the machine and reinforcement learning techniques and optimizing the robotic controls.
While this project will gather data from an exoskeleton that is tethered to computers in their lab, looking ahead, the researchers hope the technology can become implemented in the real world.
“Ideally, we want the exoskeleton to be able to measure comfort and optimize the control as the person is wearing it out in the wild,” Cheng said.
In the path to develop more advanced and user-friendly assistive robotics, this project represents a strong step forward, according to Martin.
“This project will help us figure out how to have a human and machine work together cooperatively and how that can ultimately help people,” Martin said.
###
Additional collaborators on the project include Jungchih Chiao, the Mary and Richard Templeton Centennial Chair of Electrical Engineering, and Carlos Davila, associate professor, both at Southern Methodist University.
Media Contact
A’ndrea Elyse Messer
[email protected]
814-865-5689



{kind=link}