Credit: Eric Johnson/University of Washington
About 1 million adults in the United States need someone to help them eat, according to census data from 2010.
It’s a time-consuming and often awkward task, one largely done out of necessity rather than choice.
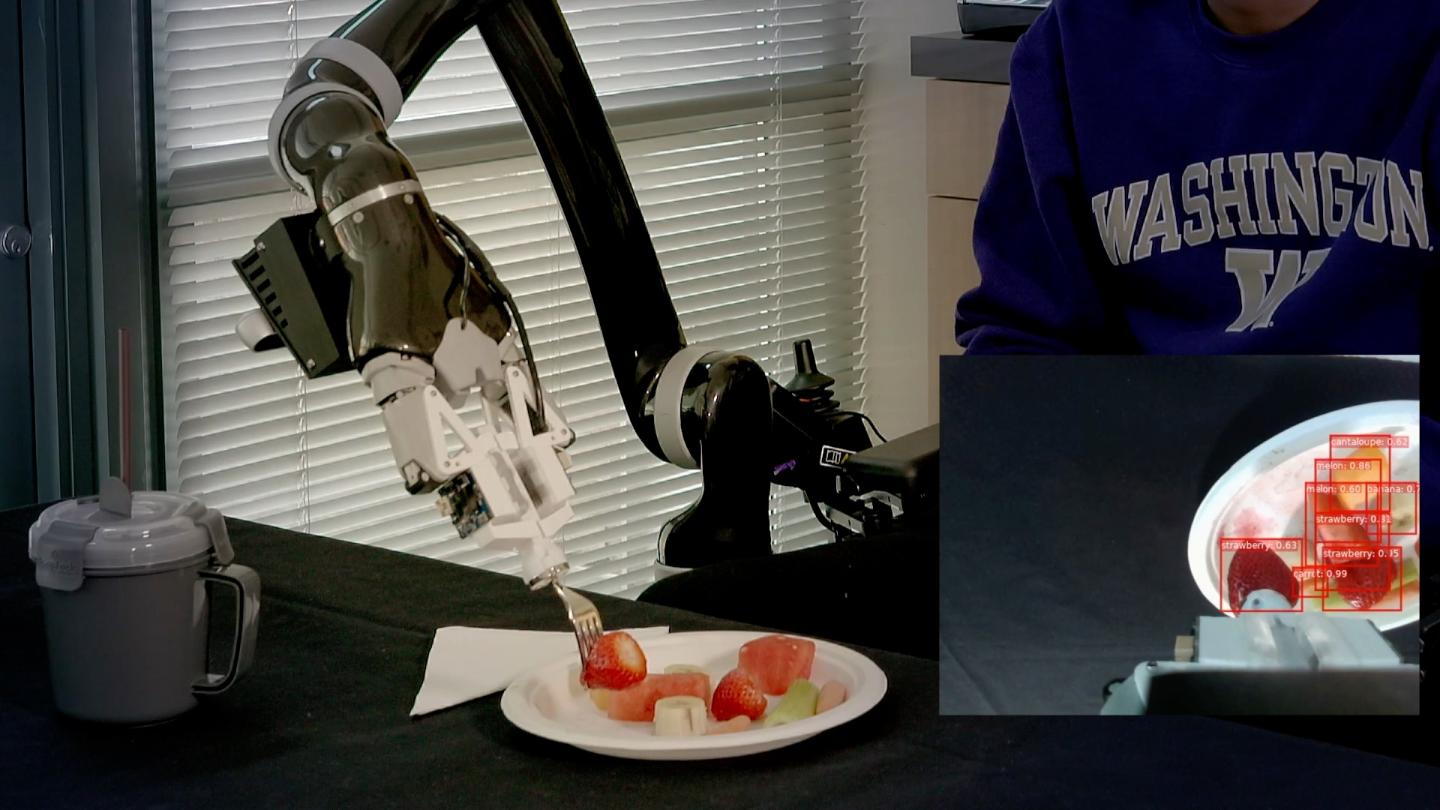
Researchers at the University of Washington are working on a robotic system that can help make it easier. After identifying different foods on a plate, the robot can strategize how to use a fork to pick up and deliver the desired bite to a person’s mouth.
The team published its results in a series of papers: One was recently published in IEEE Robotics and Automation Letters, while the other will be presented March 13 at the ACM/IEEE International Conference on Human-Robot Interaction in South Korea.
“Being dependent on a caregiver to feed every bite every day takes away a person’s sense of independence,” said corresponding author Siddhartha Srinivasa, the Boeing Endowed Professor in the UW’s Paul G. Allen School of Computer Science & Engineering. “Our goal with this project is to give people a bit more control over their lives.”
The idea was to develop an autonomous feeding system that would be attached to people’s wheelchairs and feed people whatever they wanted to eat.
“When we started the project we realized: There are so many ways that people can eat a piece of food depending on its size, shape or consistency. How do we start?” said co-author Tapomayukh Bhattacharjee, a postdoctoral research associate in the Allen School. “So we set up an experiment to see how humans eat common foods like grapes and carrots.”
The researchers arranged plates with about a dozen different kinds of food, ranging in consistency from hard carrots to soft bananas. The plates also included foods like tomatoes and grapes, which have a tough skin and soft insides. Then the team gave volunteers a fork and asked them to pick up different pieces of food and feed them to a mannequin. The fork contained a sensor to measure how much force people used when they picked up food.
The volunteers used various strategies to pick up food with different consistencies. For example, people skewered soft items like bananas at an angle to keep them from slipping off the fork. For items like carrots and grapes, the volunteers tended to use wiggling motions to increase the force and spear each bite.
“People seemed to use different strategies not just based on the size and shape of the food but also how hard or soft it is. But do we actually need to do that?” Bhattacharjee said. “We decided to do an experiment with the robot where we had it skewer food until the fork reached a certain depth inside, regardless of the type of food.”
The robot used the same force-and-skewering strategy to try to pick up all the pieces of food, regardless of their consistency. It was able to pick up hard foods, but it struggled with soft foods and those with tough skins and soft insides. So robots, like humans, need to adjust how much force and angle they use to pick up different kinds of food.
The team also noted that the acts of picking up a piece of food and feeding it to someone are not independent of each other. Volunteers often would specifically orient a piece of food on the fork so that it could be eaten easily.
“You can pick up a carrot stick by skewering it in the center of the stick, but it will be difficult for a person to eat,” Bhattacharjee said. “On the other hand, if you pick it up on one of the ends and then tilt the carrot toward someone’s mouth, it’s easier to take a bite.”
To design a skewering and feeding strategy that changes based on the food item, the researchers combined two different algorithms. First they used an object-detection algorithm called RetinaNet, which scans the plate, identifies the types of food on it and places a frame around each item.
Then they developed SPNet, an algorithm that examines the type of food in a specific frame and tells the robot the best way to pick up the food. For example, SPNet tells the robot to skewer a strawberry or a slice of banana in the middle, and spear carrots at one of the two ends.
The team had the robot pick up pieces of food and feed them to volunteers using SPNet or a more uniform strategy: an approach that skewered the center of each food item regardless of what it was. SPNet’s varying strategies outperformed or performed the same as the uniform approach for all the food.
“Many engineering challenges are not picky about their solutions, but this research is very intimately connected with people,” Srinivasa said. “If we don’t take into account how easy it is for a person to take a bite, then people might not be able to use our system. There’s a universe of types of food out there, so our biggest challenge is to develop strategies that can deal with all of them.”
The team is currently working with the Taskar Center for Accessible Technology to get feedback from caregivers and patients in assisted living facilities on how to improve the system to match people’s needs.
“Ultimately our goal is for our robot to help people have their lunch or dinner on their own,” Srinivasa said. “But the point is not to replace caregivers: We want to empower them. With a robot to help, the caregiver can set up the plate, and then do something else while the person eats.”
###
Co-authors for the first paper include doctoral student Gilwoo Lee and research scientist Hanjun Song, both at the Allen School. Co-authors on the second paper include Daniel Gallenberger, a master’s student at Technische Universität München in Germany who completed this research while at the UW, and Youngsun Kim, a research scientist at the Allen School. This work was first debuted at the recent NeurIPS conference, where it won a best demo award. This research was funded by the National Institutes of Health, the National Science Foundation, the Office of Naval Research, the Robotics Collaborative Technology Alliance, Amazon and Honda.
For more information, contact Srinivasa at [email protected].
Grant numbers: R01EB019335, 1544797, 1637748
Media Contact
Sarah McQuate
[email protected]
Original Source
http://www.
Related Journal Article
http://dx.

{kind=link}